walking and running experiments with the quadruped robot StarlETH скачать в хорошем качестве
walking and running experiments with the quadruped robot StarlETH
13 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: walking and running experiments with the quadruped robot StarlETH в качестве 4k
У нас вы можете посмотреть бесплатно walking and running experiments with the quadruped robot StarlETH или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон walking and running experiments with the quadruped robot StarlETH в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
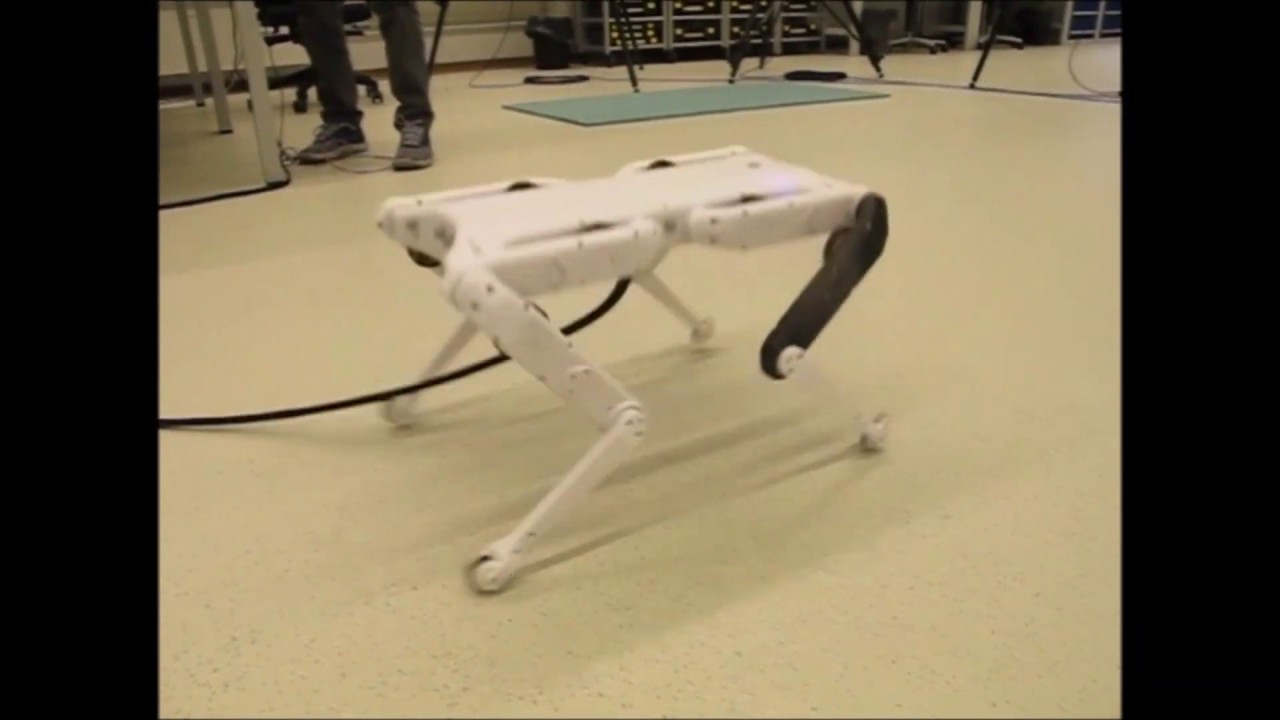
walking and running experiments with the quadruped robot StarlETH
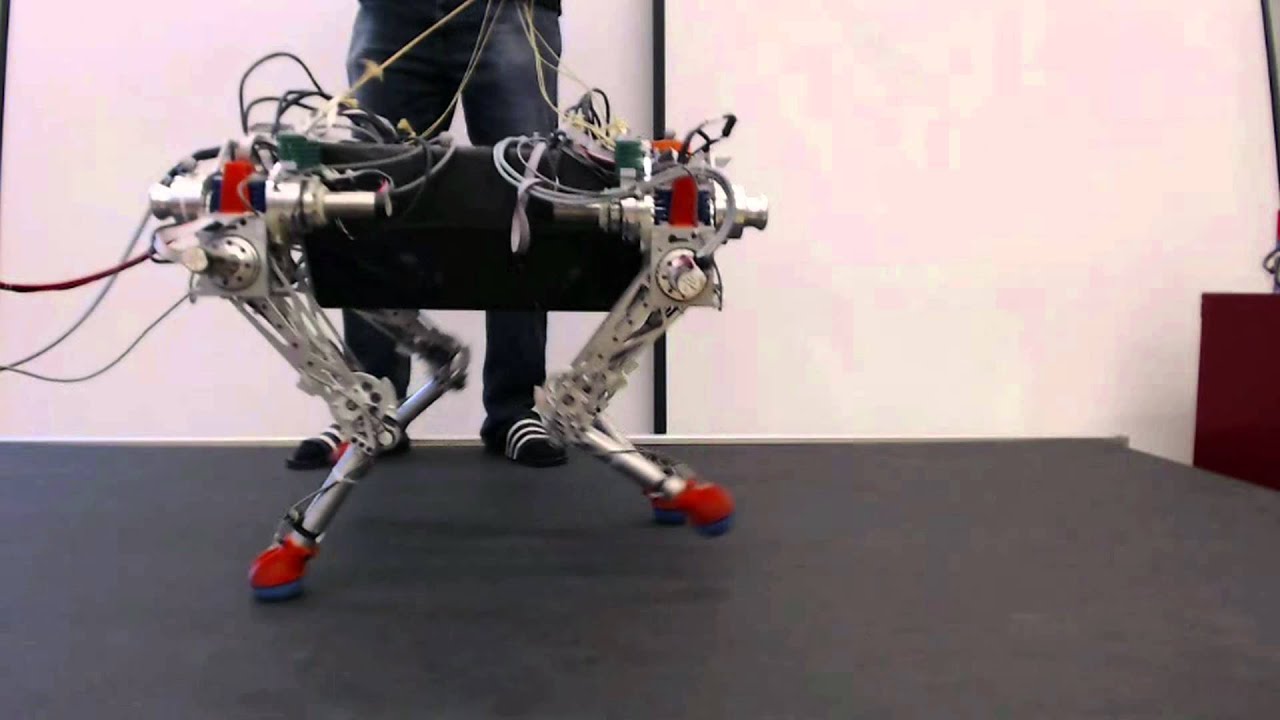
This movie summarizes some achievements with our quadrupedal robot StarlETH. This machine is driven by 12 high compliant series elastic acutators. The control strategy for these sequences is based on hierarchical task-space inverse dynamics. More information can be found at http://leggedrobotics.ethz.ch
Comments