Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization скачать в хорошем качестве
Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization
7 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization в качестве 4k
У нас вы можете посмотреть бесплатно Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization
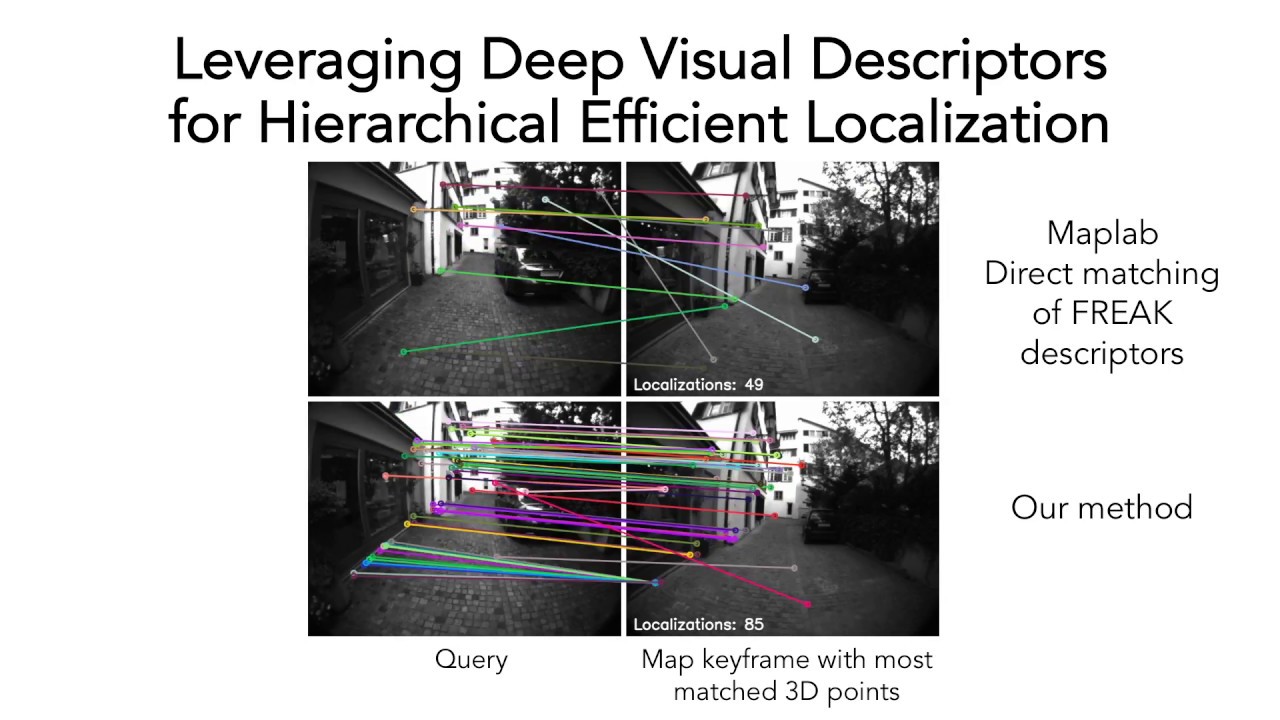
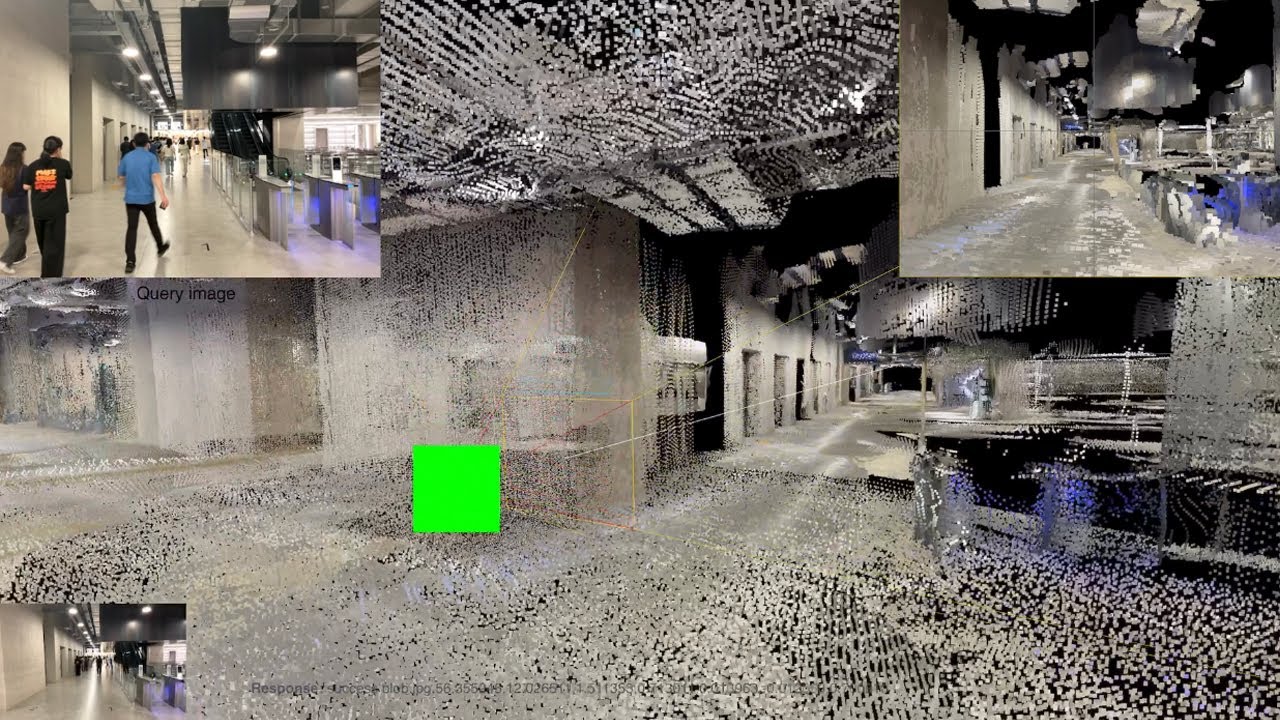
Accompanying video for our CoRL 2018 contribution "Leveraging Deep Visual Descriptors for Hierarchical Efficient Localization": https://arxiv.org/abs/1809.01019 The source code is available on github: https://github.com/ethz-asl/hierarchi... and relies on mapping types provided by the maplab framework: https://github.com/ethz-asl/maplab Abstract: Many robotics applications require precise pose estimates despite operating in large and changing environments. This can be addressed by visual localization, using a pre-computed 3D model of the surroundings. The pose estimation then amounts to finding correspondences between 2D keypoints in a query image and 3D points in the model using local descriptors. However, computational power is often limited on robotic platforms, making this task challenging in large-scale environments. Binary feature descriptors significantly speed up this 2D-3D matching, and have become popular in the robotics community, but also strongly impair the robustness to perceptual aliasing and changes in viewpoint, illumination and scene structure. In this work, we propose to leverage recent advances in deep learning to perform an efficient hierarchical localization. We first localize at the map level using learned image-wide global descriptors, and subsequently estimate a precise pose from 2D-3D matches computed in the candidate places only. This restricts the local search and thus allows to efficiently exploit powerful non-binary descriptors usually dismissed on resource-constrained devices. Our approach results in state-of-the-art localization performance while running in real-time on a popular mobile platform, enabling new prospects for robotics research.
Comments











![[CVPR 2023] Unsupervised Continual Semantic Adaptation through Neural Rendering](https://imager.clipsaver.ru/XfNLsl8ATNY/max.jpg)



![[RA-L] Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization](https://imager.clipsaver.ru/FkY7t2IeWhE/max.jpg)


