Safe Quadrotor Navigation using Composite Control Barrier Functions скачать в хорошем качестве
Safe Quadrotor Navigation using Composite Control Barrier Functions
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Safe Quadrotor Navigation using Composite Control Barrier Functions в качестве 4k
У нас вы можете посмотреть бесплатно Safe Quadrotor Navigation using Composite Control Barrier Functions или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Safe Quadrotor Navigation using Composite Control Barrier Functions в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Safe Quadrotor Navigation using Composite Control Barrier Functions
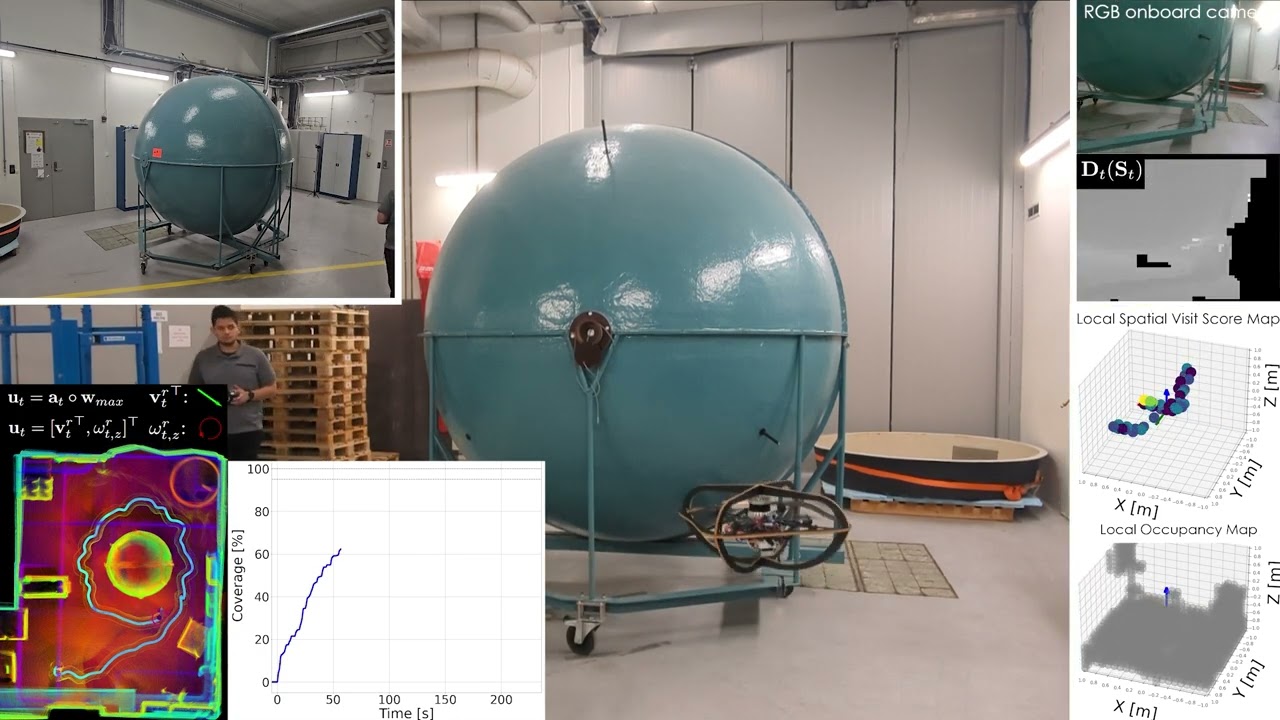
This paper introduces a safety filter to ensure collision avoidance for multirotor aerial robots. The proposed formalism leverages a single Composite Control Barrier Function from all position constraints acting on a third-order nonlinear representation of the robot's dynamics. We analyze the recursive feasibility of the safety filter under the composite constraint and demonstrate that the infeasible set is negligible. The proposed method allows computational scalability against thousands of constraints and, thus, complex scenes with numerous obstacles. We experimentally demonstrate its ability to guarantee the safety of a quadrotor with an onboard LiDAR, operating in both indoor and outdoor cluttered environments against both naive and adversarial nominal policies. Work accepted at IEEE ICRA 2025.
Comments
















![Почему взрываются батарейки и аккумуляторы? [Veritasium]](https://imager.clipsaver.ru/a3-3R9zwyGY/max.jpg)