Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares скачать в хорошем качестве
Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares
6 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares в качестве 4k
У нас вы можете посмотреть бесплатно Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Control of a Wheeled Non-holonomic Mobile Robot by Using MSC Adams and MATLAB softwares
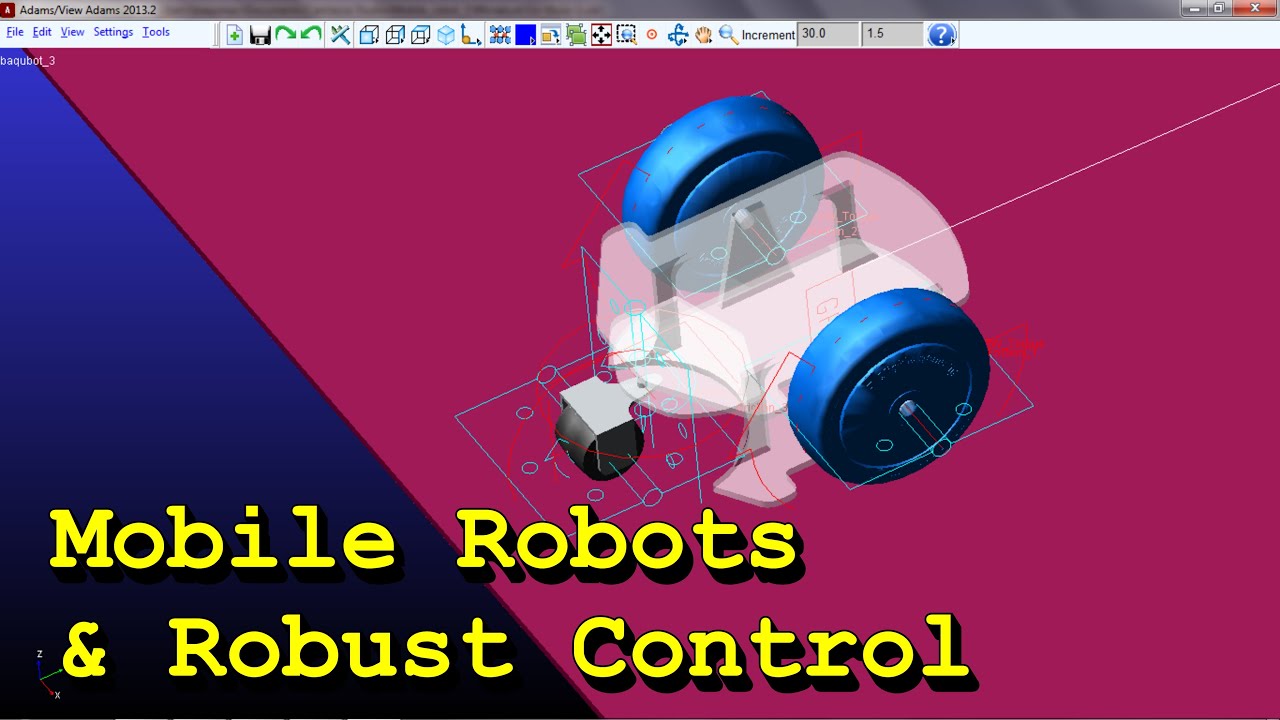
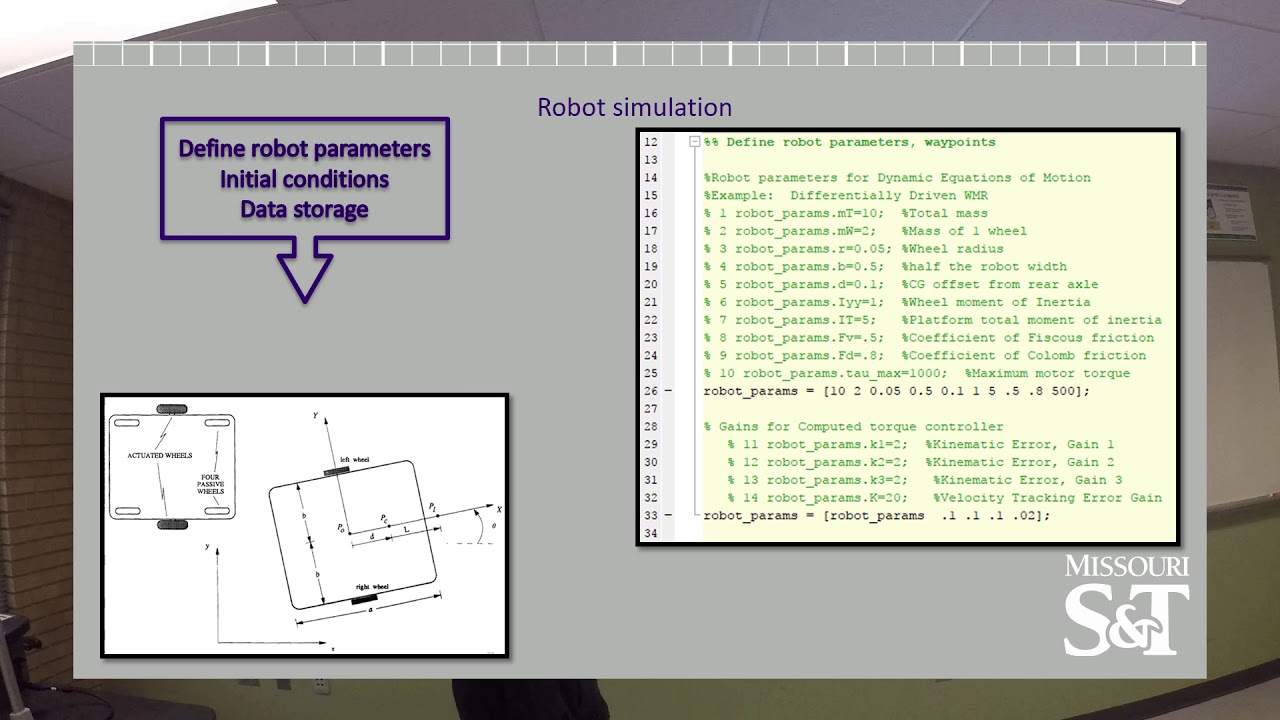
#MobileRobots #RobustControl #baqumauMechatronics This video shows a cooperative simulation between Adams and MATLAB softwares, where a wheeled mobile robot is forced to track an arbitrary trajectory around the floor. In this cooperative simulation, a virtual dynamic model of the robot is modeled on MSC Adams, and its control system is programmed on MATLAB so that, an arbitrary trajectory can be tracked by this vehicle. Visit my channel: @baqumau-Mechatronics
Comments







![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)


![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)