Autonomous Mobile Manipulator скачать в хорошем качестве
Autonomous Mobile Manipulator
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Autonomous Mobile Manipulator в качестве 4k
У нас вы можете посмотреть бесплатно Autonomous Mobile Manipulator или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Autonomous Mobile Manipulator в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
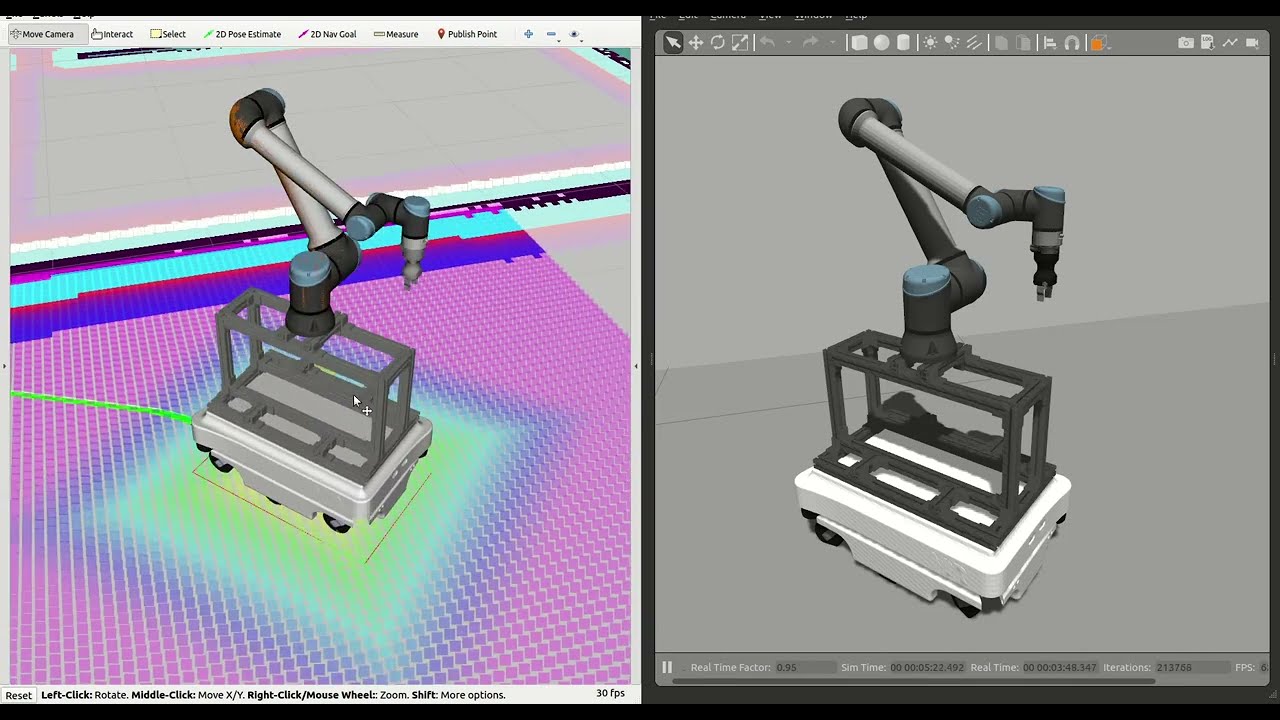
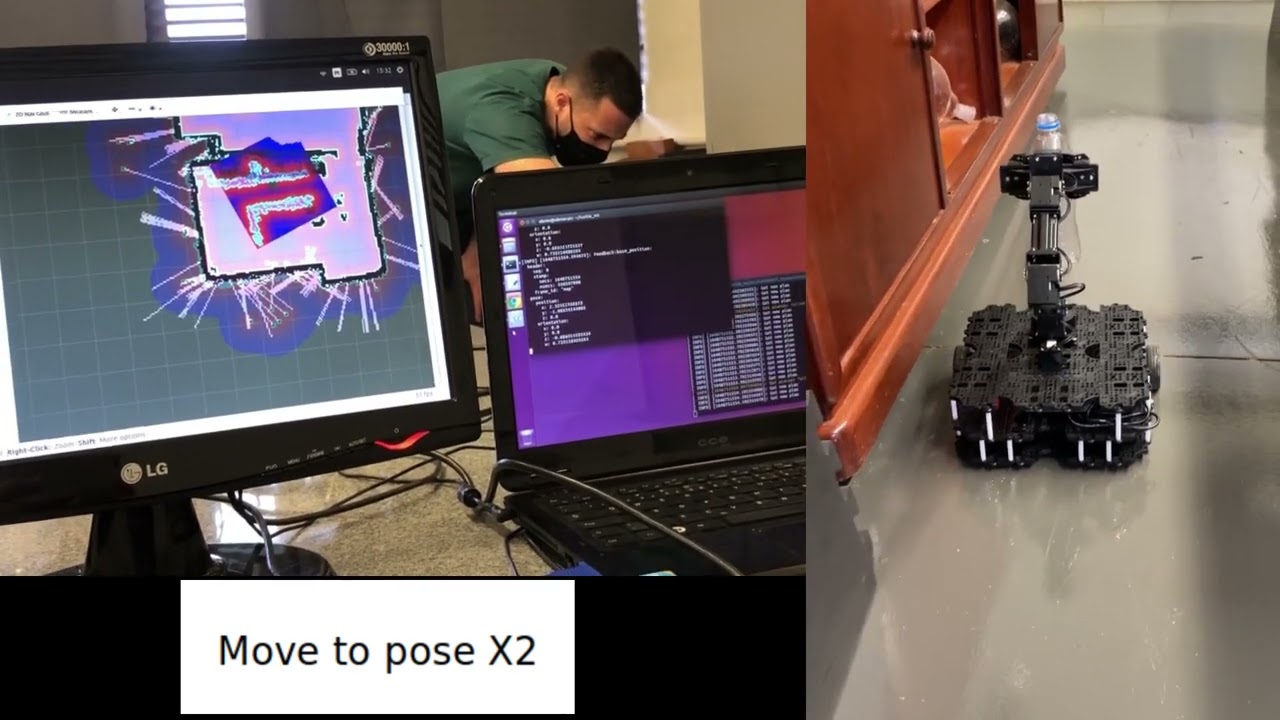
Autonomous Mobile Manipulator
I am pleased to present the currently results in our work with autonomous mobile manipulators at UFTM. After we had assembled our #turtlebot3 ROBOTIS (Robot is ...) with #OpenManipulator, we are now able to implement and test our codes. In this task we say to the robot: Move to the position X1 with the orientation W1, pick the object, move to the position X2 with orientation W2 and place the object. The rest is done by the autonomous robot, without any intervention, with support of the ROS packages #MoveIt and #Navigation. Next we are going to move to ROS2 to implement the amazing new features already released by @Steve Macenski and @PickNik Robotics. Congratulations for this work done by @Juliana Suzuki, @Pedro Casare and @Samuel Simionato dos Santos. References: -Turtlebot3 + OpenManipulator: https://emanual.robotis.com/docs/en/p... Navigation: http://wiki.ros.org/navigation Manipulation: https://ros-planning.github.io/moveit... My_package: https://github.com/ViniciusAbrao/turt...
Comments