Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material скачать в хорошем качестве
Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material в качестве 4k
У нас вы можете посмотреть бесплатно Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
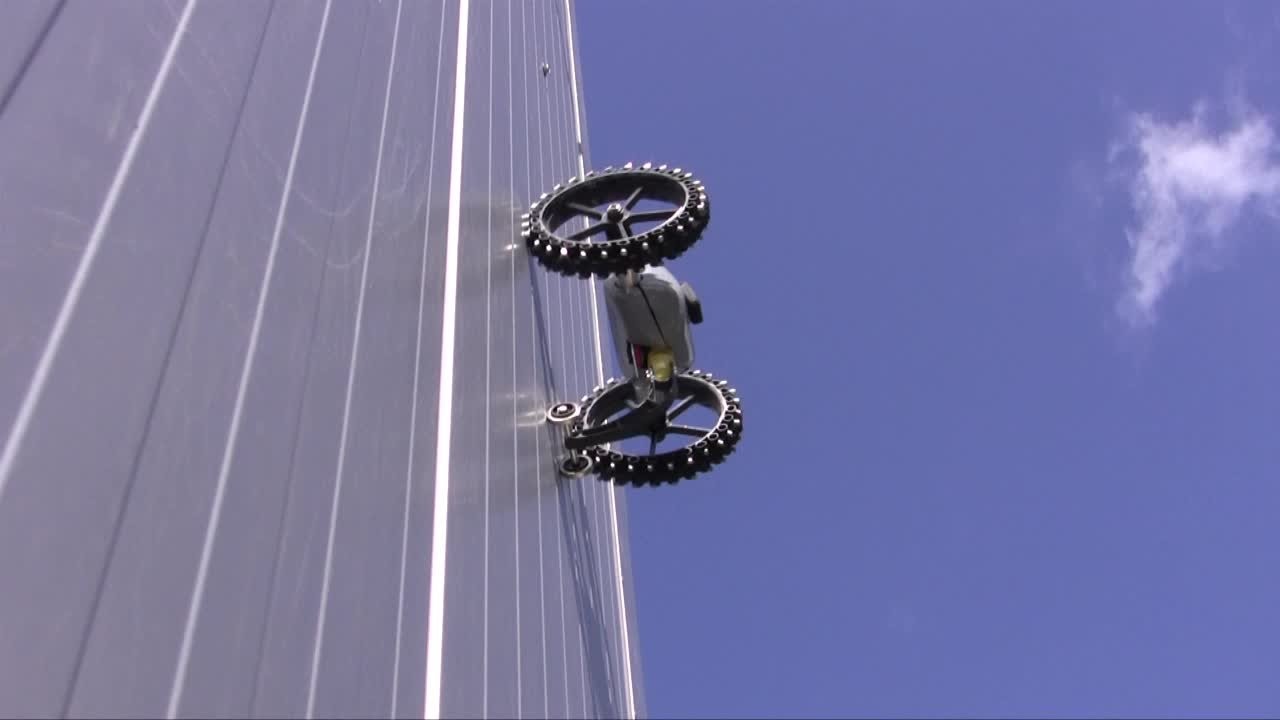
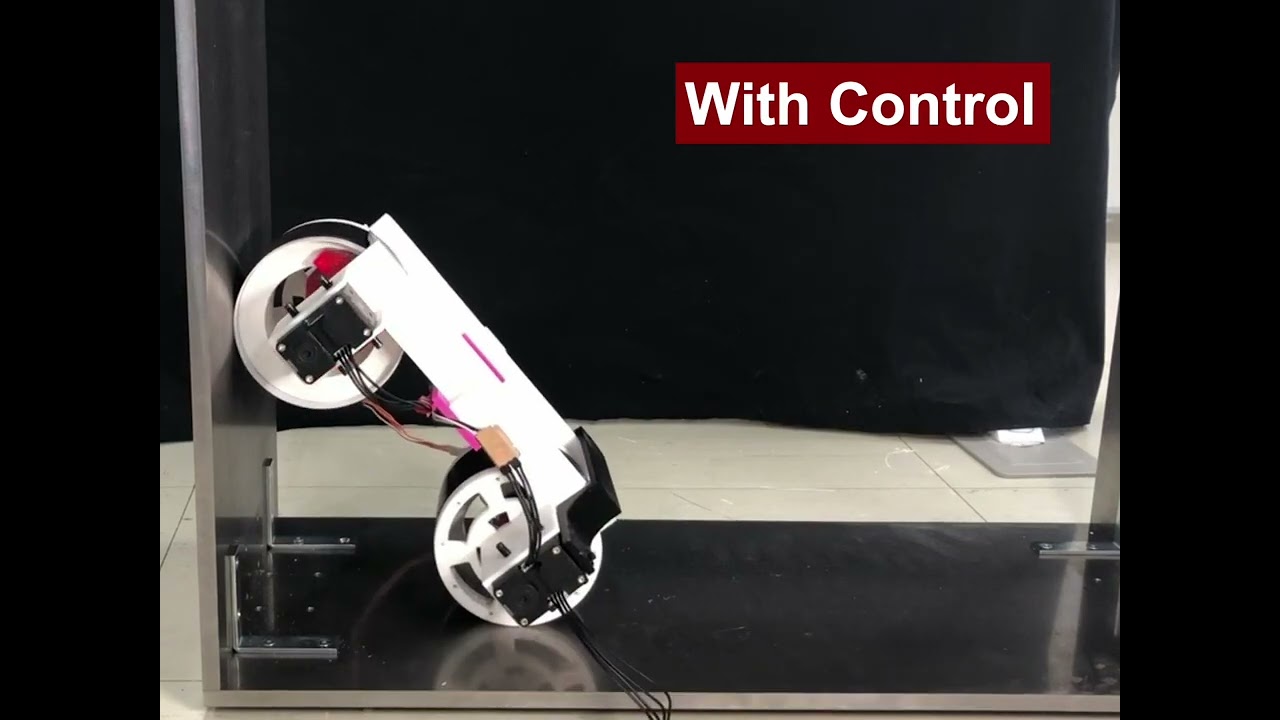
Magnetic Wall-Climbing Wheels with Controllable Adhesion Reduction via Soft Magnetic Material
With the aging of critical infrastructure like bridges and plant facilities, the development of innovative wall-climbing robots using permanent magnets has become increasingly important. Traditional designs of such robots depend on controlling the position of lifters or permanent magnets to control the adhesion condition, which introduces significant safety concerns, including inconsistent adhesion during surface transitions and the risk of falls when control is lost. To overcome these issues, this paper introduces a novel magnet wheel design that utilizes Soft Magnetic Material (SMM) to control the reduction of adhesive force in a specific direction. The effect on adhesion was shown with a comparative analysis of various magnet and SMM configurations. Based on the analyses, a wheel design was provided with investigating the effect of the SMM cover region. For verifying the effectiveness of the adhesion reduction, a robot with the proposed wheel is presented and analyzed to realize wall-climbing tasks. In experiments, a prototype robot equipped with the proposed wheel design demonstrates enhanced safety for wall-climbing tasks under controlled conditions. https://doi.org/10.1109/LRA.2024.3496315
Comments




![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)