Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS) скачать в хорошем качестве
Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS)
11 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS) в качестве 4k
У нас вы можете посмотреть бесплатно Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
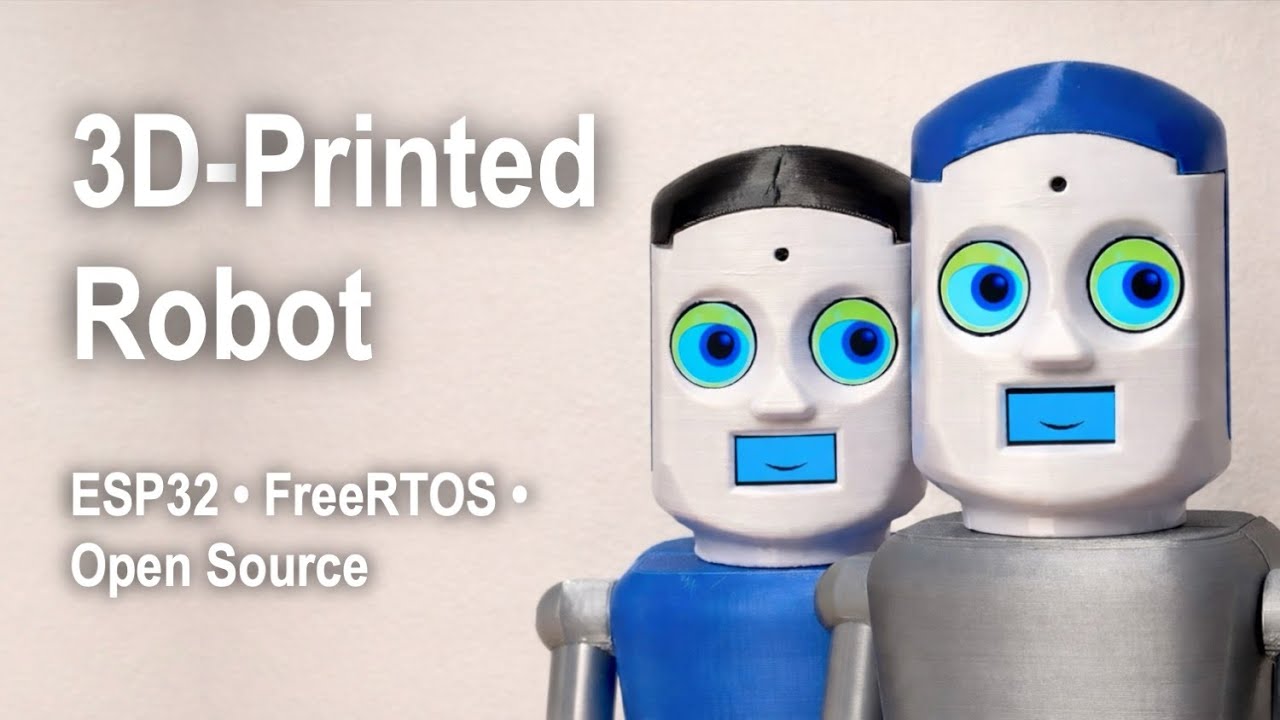
Marvin, a 3D-Printed Open-Source Robot (ESP32 + FreeRTOS)
Marvin is a fully 3D-printed open-source robot based on an ESP32 microcontroller running FreeRTOS. He features animated LCD eyes, an OLED mouth, servo-driven arm and head movements, stepper-based locomotion, sound sensing, orientation sensing, autonomous behaviors, and optional Wi-Fi remote control. The project is designed for makers, students, and educators who want to explore embedded systems, electronics, the Arduino framework, 3D printing, PCB design, and robotics in a hands-on way. Marvin uses inexpensive and widely available components such as breakout boards, servos, steppers, and an ESP32 D1-mini module, making the robot reproducible without specialized tools. All project files are publicly available, including firmware, PCB design files (KiCad), CAD models (Autodesk Fusion), STL and 3MF printing data, and a complete bill of materials. 🔧 GitHub Repository: https://github.com/lhm0/marvin_robot 📄 Build Instructions (Instructables): https://www.instructables.com/ESP32-B... The robot can be built as a small “lively” desktop companion or as an educational platform for teaching robotics concepts such as real-time scheduling, I/O control, sensor fusion, and behavior control. Technologies used: – ESP32 (D1-mini module) – FreeRTOS task scheduling – Arduino framework (PlatformIO) – KiCad for PCB design – Autodesk Fusion for CAD – 3D printing (STL + 3MF) – Wi-Fi remote control – Servo / stepper motor control – I2S audio output + microphone input – MPC6050 orientation sensing If you decide to build your own version or modify the design, I’d be happy to see it! 00:00 Introduction 00:47 Project Goals 01:19 Actuators and Displays 02:54 The ESP32 and Electronics 03:30 The 3D-Printed Mechanical Enclosure 03:54 Behaviors: Eyes, Mouth, Sound 04:17 FreeRTOS Processes and Scheduling 05:00 Servo and Stepper Movements 05:44 Sound Detection 06:04 Orientation and Service Modes 06:53 Wi-Fi Remote Control 07:33 Resources for Reconstruction 07:44 GitHub Repository Overview 09:05 CAD and PCB Design Files 09:44 Software in VS Code (PlatformIO) 10:26 Instructables Build Guide 10:47 Concluding Remarks
Comments