Instant Policy: In-Context Imitation Learning via Graph Diffusion скачать в хорошем качестве
Instant Policy: In-Context Imitation Learning via Graph Diffusion
9 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Instant Policy: In-Context Imitation Learning via Graph Diffusion в качестве 4k
У нас вы можете посмотреть бесплатно Instant Policy: In-Context Imitation Learning via Graph Diffusion или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Instant Policy: In-Context Imitation Learning via Graph Diffusion в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Instant Policy: In-Context Imitation Learning via Graph Diffusion
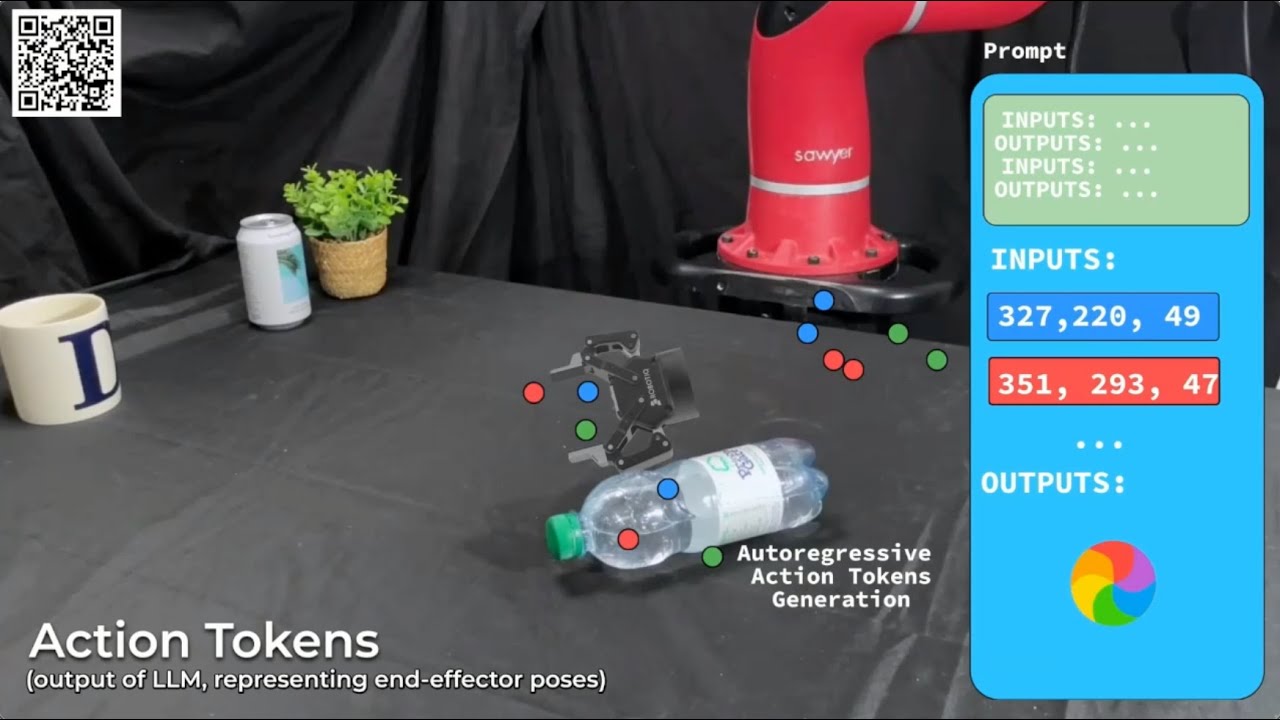
Author: Vitalis Vosylius and Edward Johns Institution: The Robot Learning Lab at Imperial College London Published at: ICLR 2025 Paper: https://arxiv.org/pdf/2411.12633 Webpage: https://www.robot-learning.uk/instant... Abstract: Following the impressive capabilities of in-context learning with large transformers, In-Context Imitation Learning (ICIL) is a promising opportunity for robotics. We introduce Instant Policy, which learns new tasks instantly (without further training) from just one or two demonstrations, achieving ICIL through two key components. First, we introduce inductive biases through a graph representation and model ICIL as a graph generation problem with a learned diffusion process, enabling structured reasoning over demonstrations, observations, and actions. Second, we show that such a model can be trained using pseudo-demonstrations - arbitrary trajectories generated in simulation - as a virtually infinite pool of training data. Simulated and real experiments show that Instant Policy enables rapid learning of various everyday robot tasks. We also show how it can serve as a foundation for cross-embodiment and zero-shot transfer to language-defined tasks.
Comments
-
 3 года назад
3 года назад
-
 7 месяцев назад
7 месяцев назад
-
 2 месяца назад
2 месяца назад
-
 2 года назад
2 года назад
-
 1 день назад
1 день назад
-
 2 года назад
2 года назад
-
 21 час назад
21 час назад
-
 1 год назад
1 год назад
-
 1 день назад
1 день назад
-
 Трансляция закончилась 6 месяцев назад
Трансляция закончилась 6 месяцев назад
-
 2 года назад
2 года назад
-
 4 года назад
4 года назад
-
 7 месяцев назад
7 месяцев назад
-
 1 год назад
1 год назад
-
 1 год назад
1 год назад
-
 5 месяцев назад
5 месяцев назад
-
 1 год назад
1 год назад
-
 5 месяцев назад
5 месяцев назад
-
 11 месяцев назад
11 месяцев назад
-
 2 недели назад
2 недели назад