Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics скачать в хорошем качестве
Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics в качестве 4k
У нас вы можете посмотреть бесплатно Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
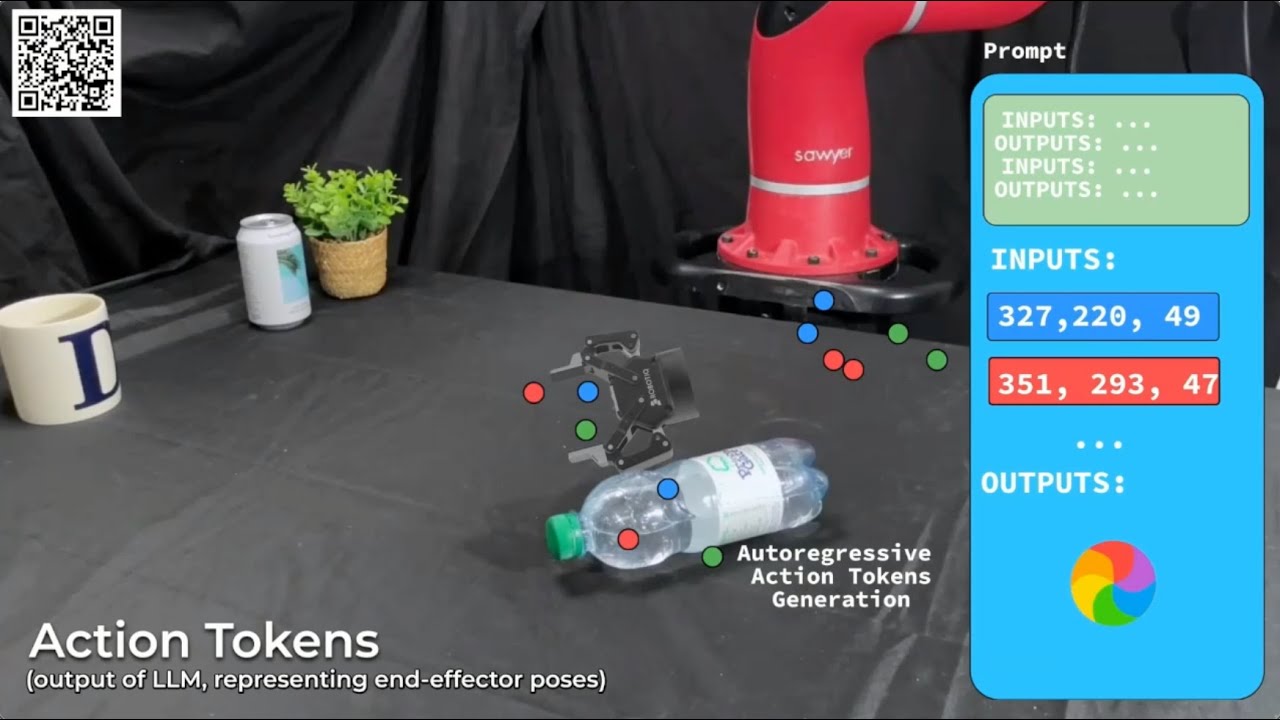
Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics
Authors: Norman Di Palo and Edward Johns Institution: The Robot Learning Lab at Imperial College London Published at: RSS 2024 Paper: https://arxiv.org/pdf/2403.19578 Webpage: https://www.robot-learning.uk/keypoin... Abstract: We show that off-the-shelf text-based Transformers, with no additional training, can perform few-shot in-context visual imitation learning, mapping visual observations to action sequences that emulate the demonstrator's behaviour. We achieve this by transforming visual observations (inputs) and trajectories of actions (outputs) into sequences of tokens that a text-pretrained Transformer (GPT-4 Turbo) can ingest and generate, via a framework we call Keypoint Action Tokens (KAT). Despite being trained only on language, we show that these Transformers excel at translating tokenised visual keypoint observations into action trajectories, performing on par or better than state-of-the-art imitation learning (diffusion policies) in the low-data regime on a suite of real-world, everyday tasks. Rather than operating in the language domain as is typical, KAT leverages text-based Transformers to operate in the vision and action domains to learn general patterns in demonstration data for highly efficient imitation learning, indicating promising new avenues for repurposing natural language models for embodied tasks.
Comments



![[CMU VASC Seminar] Foundation Models for Robotic Manipulation: Opportunities and Challenges](https://imager.clipsaver.ru/akDSG9FsoCk/max.jpg)