Autonomous Aerial Navigation in Confined Indoor Environments скачать в хорошем качестве
Autonomous Aerial Navigation in Confined Indoor Environments
15 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Autonomous Aerial Navigation in Confined Indoor Environments в качестве 4k
У нас вы можете посмотреть бесплатно Autonomous Aerial Navigation in Confined Indoor Environments или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Autonomous Aerial Navigation in Confined Indoor Environments в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Autonomous Aerial Navigation in Confined Indoor Environments
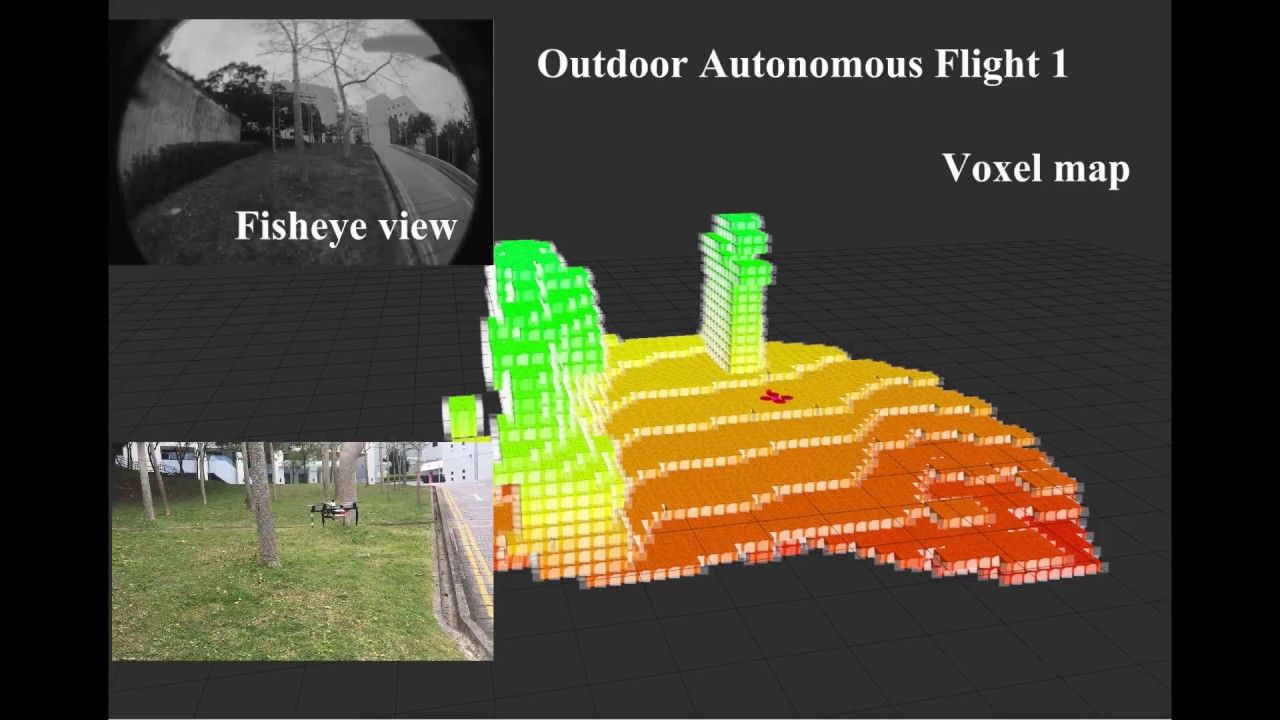
This video presents experimental results of autonomous navigation in confined indoor environments using an aerial robot. The robot is equipped with an IMU, camera, and laser scanner with deflective mirrors. All computations are performed onboard using a 1.6GHz atom processor. The robot is able to navigate autonomously in indoor or outdoor, GPS-denied environments. A SLAM module with vision based loop closure allows the robot to map large-scale, multi-floor environments. A sparse 3D map is generated on the robot based on sensor data, enabling high-level planning and visualization. An RRT* based planner provides an anytime planning solution that fits the computational constraints of the robot. This planner also enables online re-planning and obstacle avoidance. An LQR optimal controller with external force compensation enables reliable autonomous flight in highly constrained environments, such as hallways, doors, and windows. The robot is able to track the high-level plans accurately.
Comments