RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa... скачать в хорошем качестве
RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa...
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa... в качестве 4k
У нас вы можете посмотреть бесплатно RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa... или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa... в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
RSS 2020, Spotlight Talk 44: Safe Motion Planning for Autonomous Driving using an Adversarial Roa...
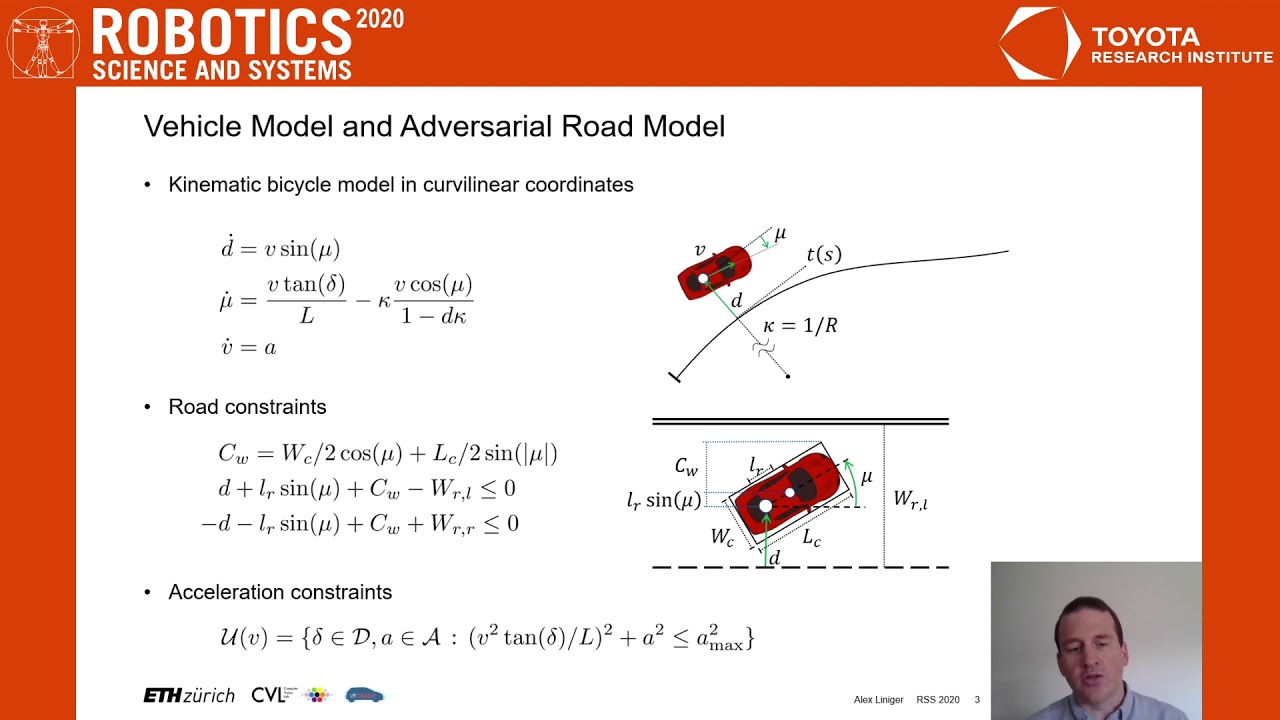
*Safe Motion Planning for Autonomous Driving using an Adversarial Road Model* Alex Liniger (ETH Zurich)*; Luc Van Gool (ETH Zurich) Publication: http://www.roboticsproceedings.org/rs... software: https://github.com/alexliniger/Advers... *Abstract* This paper presents a game-theoretic path-following formulation where the opponent is an adversary road model. This formulation allows us to compute safe sets using tools from viability theory, that can be used as terminal constraints in an optimization-based motion planner. Based on the adversary road model, we first derive an analytical discriminating domain, which even allows guaranteeing safety in the case when steering rate constraints are considered. Second, we compute the discriminating kernel and show that the output of the gridding based algorithm can be accurately approximated by a fully connected neural network, which can again be used as a terminal constraint. Finally, we show that by using our proposed safe sets, an optimization-based motion planner can successfully drive on city and country roads with prediction horizons too short for other baselines to complete the task.
Comments









![[Tutorial] Optimization, Optimal Control, Trajectory Optimization, and Splines](https://imager.clipsaver.ru/j82Ia436DYY/max.jpg)





![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://imager.clipsaver.ru/gP6MRe_IHFo/max.jpg)



![[CVPR'23 WAD] Основной доклад — Чен Ву, Waymo](https://imager.clipsaver.ru/fXsbI2VkHgc/max.jpg)