OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial скачать в хорошем качестве
OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial в качестве 4k
У нас вы можете посмотреть бесплатно OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
OptiTrack Mo-Cap System Setup, Calibration and ROS Integration Tutorial
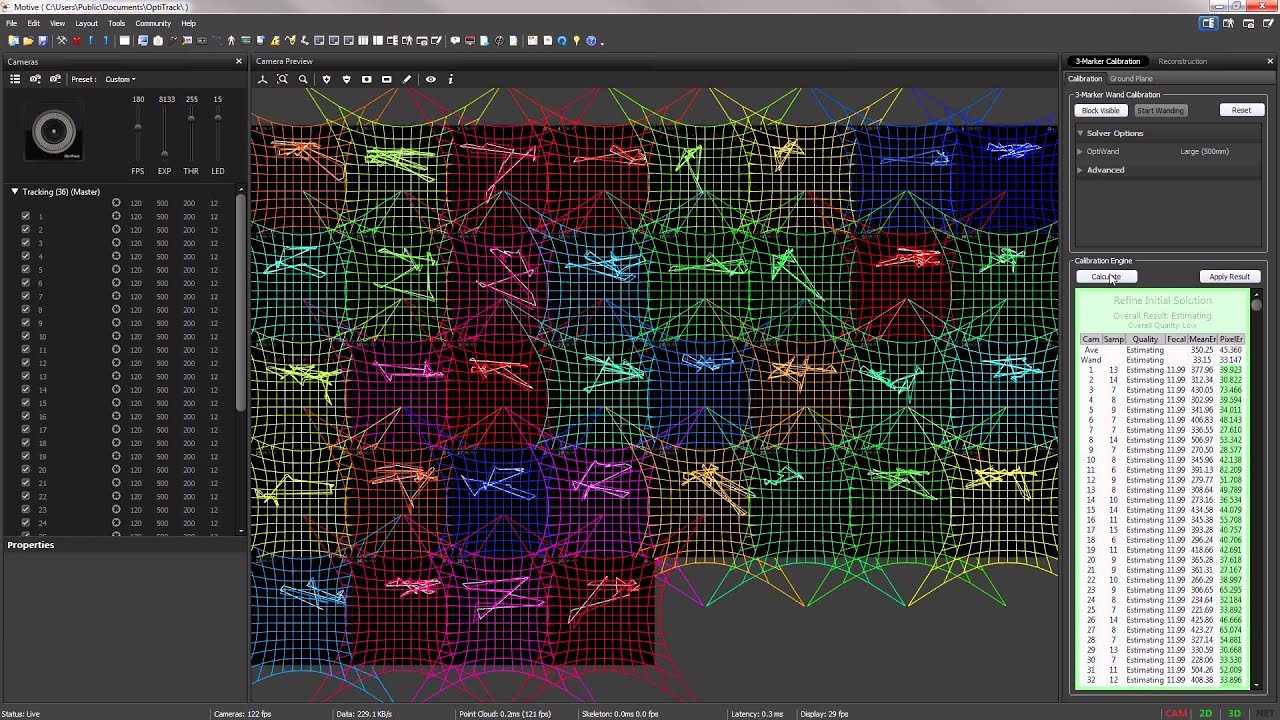
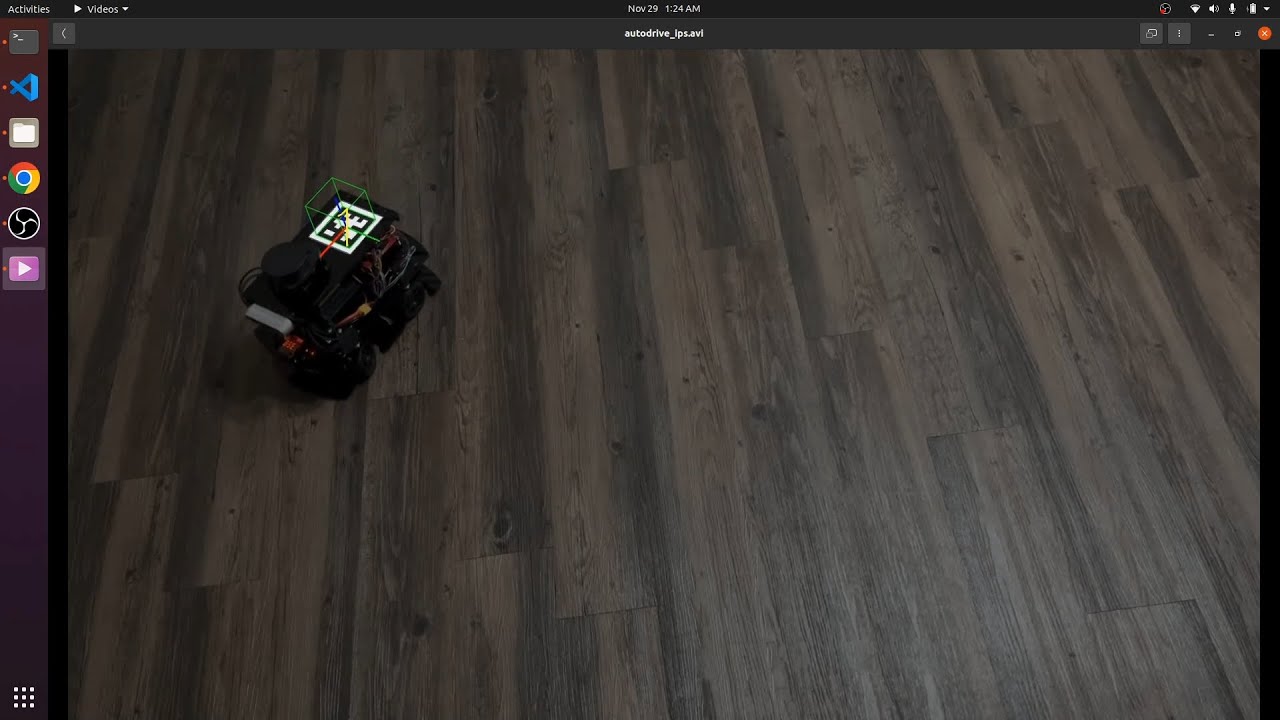
This video serves as a short yet detailed tutorial for OptiTrack Mo-Cap System Setup, Calibration and ROS Integration. Although this tutorial is primarily meant for the members of ARMLab at CU-ICAR, it can serve as a good reference for anyone working with an OptiTrack mo-cap system. The specific OptiTrack motion capture system in ARMLab uses 12 × "Prime 13" camera modules [https://optitrack.com/cameras/prime-13], each having 1.3 MP sensor resolution (1280 × 1024), 30-240 FPS adjustable framerate, 56° horizontal FOV, 46° vertical FOV, 40 ft camera-to-marker range and 0.2-0.5 mm 3D precision. ------------------------------ Calibration Steps: ------------------------------ • Initialization – Make sure one of the two cameras in each pair can see closer objects and other can see farther objects. • Wanding – Apply masks (if necessary) and click “Start Wanding” button in the “Calibration” tab of the “Camera Calibration” pane in Motive software, take the wand (T-shaped structure with 3 markers) and move it within field of view (FOV) of OptiTrack Mo-Cap system. • Setting Ground Plane – Click “Set Ground Plane” in the “Ground Plane” tab of the “Camera Calibration” pane in Motive software, take the ground plane device (appears like a set square), place it on the ground, orient it according to desired axes convention (preferably long side along +X axis and short side along +Z axis) and select the 3 marker points visible in software interface. Note that the ground plane is the X-Z plane for the of OptiTrack Mo-Cap system. ------------------------------ Tracking Steps: ------------------------------ • Place the object of interest (attached with at least 3, ideally more than 4 markers in non-planar configuration) within field of view (FOV) of OptiTrack Mo-Cap system. • Click “View” and enable “Assets” pane. • Create new asset and select the marker points visible in software interface to update the asset (sometimes you may need to disable and re-enable the asset before it starts working as expected). • Data Streaming – Click “View” and enable “Data Streaming” pane. Configure connection parameters and the data should start streaming to remote device of interest (sometimes you may need to start and stop the recording before it starts working as expected). You can quickly check if the data is streaming using the NatNet SDK. ------------------------------ Further Details: ------------------------------ Further details and instructions are available in the following GitHub repository: https://github.com/Tinker-Twins/F1TEN... ------------------------------ Helpful Resources: ------------------------------ 1. OptiTrack Hardware: https://optitrack.com/support/hardware 2. OptiTrack Software: https://optitrack.com/support/software 3. OptiTrack Documentation: https://docs.optitrack.com 4. OptiTrack Calibration: https://docs.optitrack.com/motive/cal... 5. OptiTrack ROS Package: http://wiki.ros.org/mocap_optitrack 6. OptiTrack ROS Documentation: https://tuw-cpsg.github.io/tutorials/...
Comments
![ROS 2 | TurtleBot3 SLAM and Autonomous Navigation with Sim2Real Transfer [Tutorial]](https://imager.clipsaver.ru/-4Ewuhfgbx8/max.jpg)