AprilTag Detection and Pose Estimation Tutorial скачать в хорошем качестве
AprilTag Detection and Pose Estimation Tutorial
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: AprilTag Detection and Pose Estimation Tutorial в качестве 4k
У нас вы можете посмотреть бесплатно AprilTag Detection and Pose Estimation Tutorial или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон AprilTag Detection and Pose Estimation Tutorial в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
AprilTag Detection and Pose Estimation Tutorial
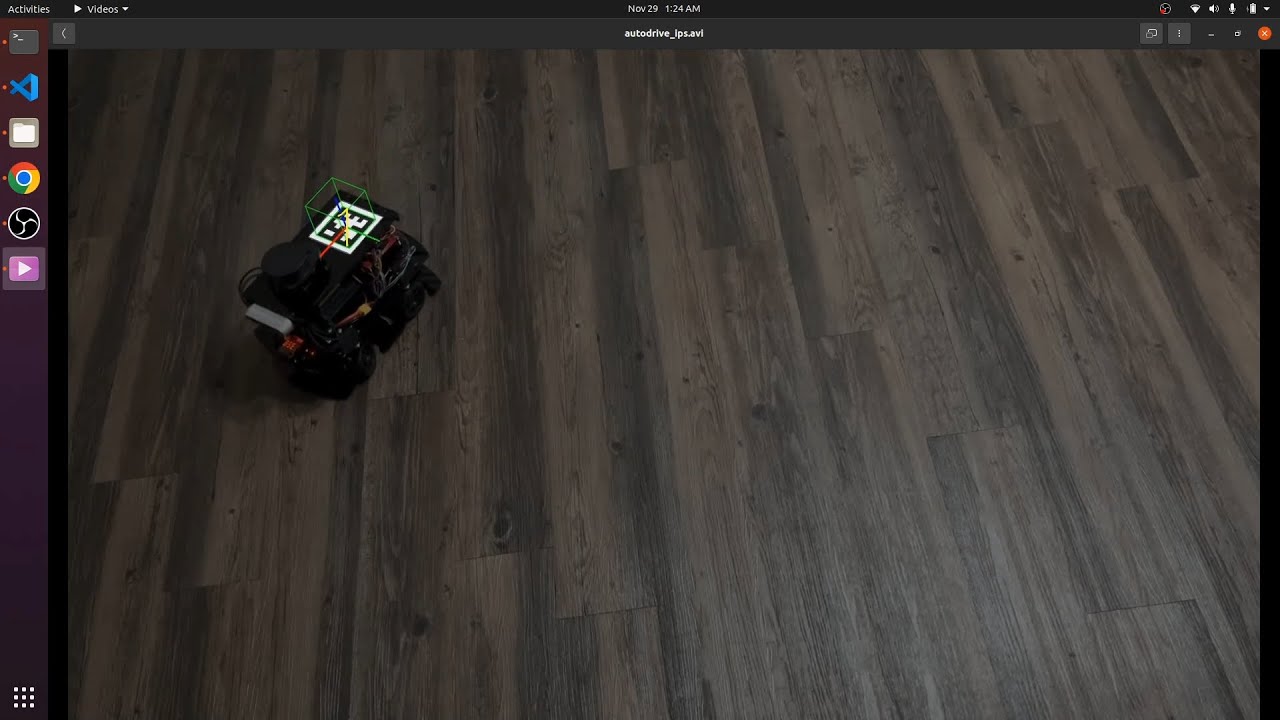
This video walks through the installation and usage steps of the real-time AprilTag detection and pose estimation algorithm. Particularly, this video covers the installation of the AprilTag library and using it to detect and estimate the pose of Nigel, a 1:14 scale autonomous vehicle, using the 'tag36h11' family. Annotations: 1. Tag Detection Highlight: A high-contrast highlight of a particular tag. 2. Tag Bounding Box: A green bounding box on top of a particular tag. 3. Tag Coordinate Frame: X (red), Y (green), Z (blue) axes w.r.t. center of tag. 4. Tag ID: A yellow text overlay denoting ID of a particular tag. Note: All the annotations are dynamic and update w.r.t. tag pose and size (in image coordinate system). Demonstration video: • AprilTag Detection and Pose Estimation Source code and instructions/examples are available at: C/C++/Python: https://github.com/Tinker-Twins/AprilTag ROS 1: https://github.com/Tinker-Twins/April... ROS 2: https://github.com/Tinker-Twins/April...
Comments
-
 1 год назад
1 год назад
-
 10 месяцев назад
10 месяцев назад
-
 1 день назад
1 день назад
-
 1 день назад
1 день назад
-
 2 недели назад
2 недели назад
-
 2 года назад
2 года назад
-
 1 год назад
1 год назад
-
 7 месяцев назад
7 месяцев назад
-
 6 месяцев назад
6 месяцев назад
-
 3 дня назад
3 дня назад
-
 3 недели назад
3 недели назад
-
 2 месяца назад
2 месяца назад
-
 6 месяцев назад
6 месяцев назад
-
 1 год назад
1 год назад
-
 2 года назад
2 года назад
-
 1 день назад
1 день назад
-
 4 месяца назад
4 месяца назад
-
 Трансляция закончилась 1 год назад
Трансляция закончилась 1 год назад
-
 7 месяцев назад
7 месяцев назад
-
 1 год назад
1 год назад