Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space скачать в хорошем качестве
Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space в качестве 4k
У нас вы можете посмотреть бесплатно Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
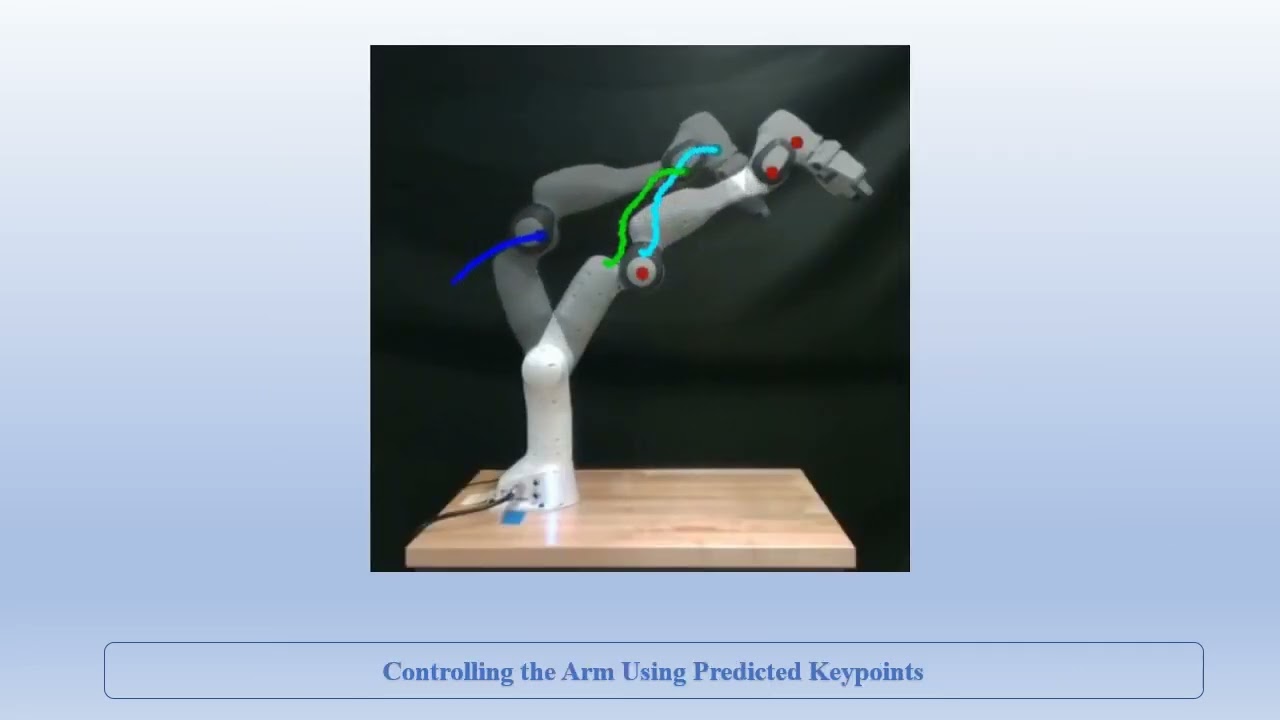
Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space
This video is a supplementary material for the following paper: Keypoints-Based Adaptive Visual Servoing for Control of Robotic Manipulators in Configuration Space Sreejani Chatterjee, Abhay C Karade, Abhinav Gandhi, Berk Calli IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023 This paper presents a visual servoing method for controlling a robot in the configuration space by purely using its natural features. We first created a data collection pipeline that uses camera intrinsics, extrinsics, and forward kinematics to generate 2D projections of a robot's joint locations (keypoints) in image space. Using this pipeline, we are able to collect large sets of real-robot data, which we use to train realtime keypoint detectors. The inferred keypoints from the trained model are used as control features in an adaptive visual servoing scheme that estimates, in runtime, the Jacobian relating the changes of the keypoints and joint velocities. We compared the 2D configuration control performance of this method to the skeleton-based visual servoing method (the only other algorithm for purely vision-based configuration space visual servoing), and demonstrated that the keypoints provide more robust and less noisy features, which result in better transient response. We also demonstrate the first vision-based 3D configuration space control results in the literature, and discuss its limitations. Our data collection pipeline is available at https://github.com/JaniC-WPI/KPDataGe... which can be utilized to collect image datasets and train realtime keypoint detectors for various robots and environments.
Comments

![Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]](https://imager.clipsaver.ru/ztMl52v3ncY/max.jpg)



![[IROS 2023] EARL: Eye-on-Hand Reinforcement Learner for Dynamic Grasping with Active Pose Estimation](https://imager.clipsaver.ru/81jbwcbhOVs/max.jpg)







![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)