Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC скачать в хорошем качестве
Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC
6 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC в качестве 4k
У нас вы можете посмотреть бесплатно Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Lidar Odometry with Ardupilot for Autonomous Driving Robot | ATCrawler BLDC
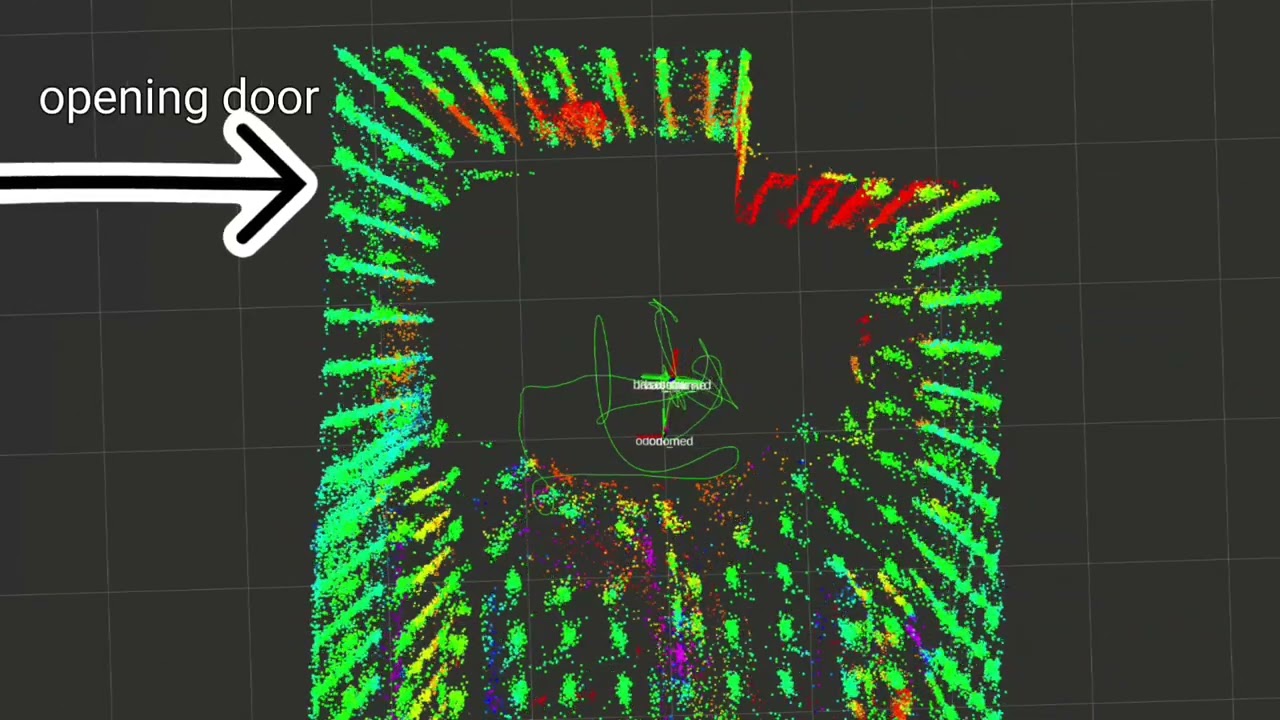
To try everything Brilliant has to offer for free for a full 30 days, visit https://brilliant.org/stepbysteprobot... or scan the QR code onscreen—or you can click on the link in the description. You’ll also get 20% off an annual premium subscription. This project is to use FAST-LIO Lidar Odometry with Ardupilot flight controller with our new ATCrawler BLDC base platform to make the autonomous driving robot. Timeline: 0:00 Intro 0:55 Hardware Overview 2:20 Ardupilot Setup 4:02 Raspberry Pi 5 Setup 6:19 Manual Test Driving 6:50 Brilliant Sponsor Time 8:20 Auto Test Driving 10:10 Simple Application 13:37 End This video was sponsored by Brilliant. For more detail of ATCrawlerr BLDC, please visit, https://attraclab-shop.com For the fl_nav2_helper package, please check on, https://github.com/attraclab/fl_nav2_... Previous ATCrawler Basic with Ardupilot • ATCrawler | GPS Navigation with Ardupilot ... Previous ATCrawler Basic with ROS • ATCrawler | The Heavy Duty ROS Robot
Comments