Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC скачать в хорошем качестве
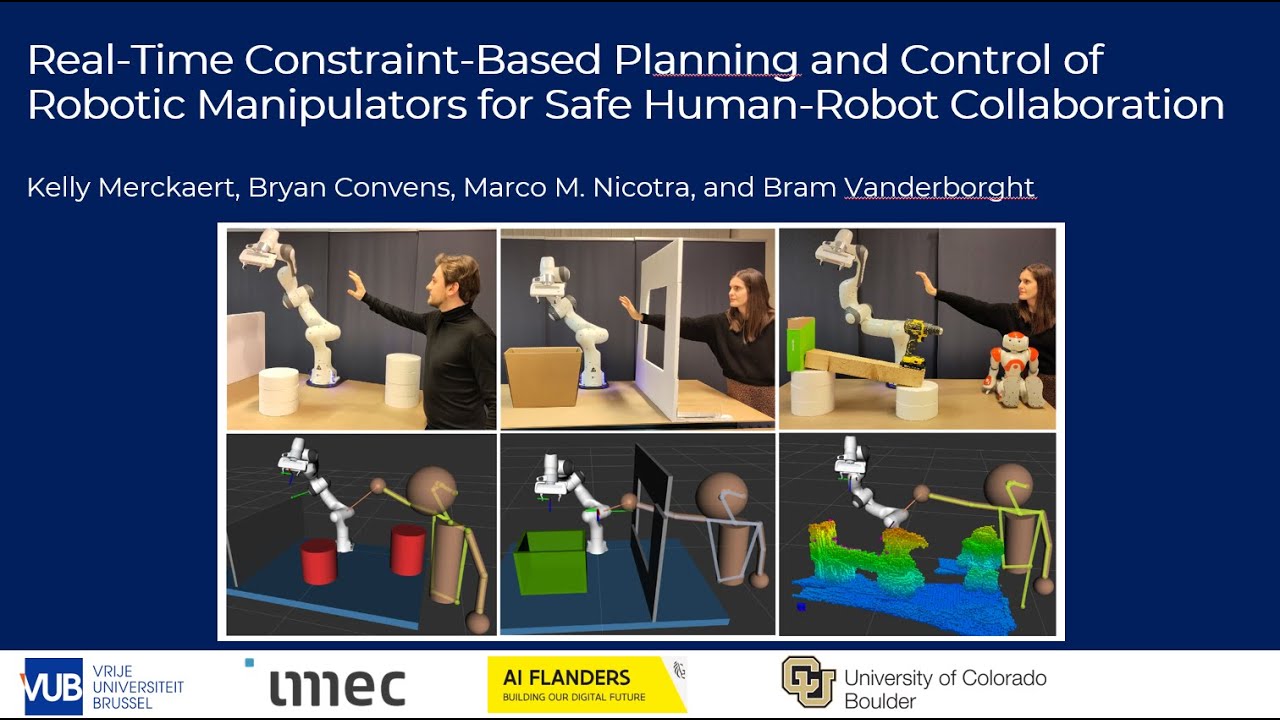
Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC в качестве 4k
У нас вы можете посмотреть бесплатно Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe HRC
𝐒𝐮𝐩𝐩𝐥𝐞𝐦𝐞𝐧𝐭𝐚𝐫𝐲 𝐦𝐚𝐭𝐞𝐫𝐢𝐚𝐥 to the Elsevier Robotics and Computer-Integrated Manufacturing article entitled "Real-Time Constraint-Based Planning and Control of Robotic Manipulators for Safe Human-Robot Collaboration", https://doi.org/10.1016/j.rcim.2023.1.... Work by Kelly Merckaert, Bryan Convens, Marco Nicotra, and Bram Vanderborght. 𝐂𝐨𝐫𝐫𝐞𝐬𝐩𝐨𝐧𝐝𝐢𝐧𝐠 𝐚𝐮𝐭𝐡𝐨𝐫 𝐜𝐨𝐧𝐭𝐚𝐜𝐭: kelly.merckaert@vub.be or kelly.merckaert@gmail.com 𝐀𝐛𝐬𝐭𝐫𝐚𝐜𝐭: A recent trend in industrial robotics is to have robotic manipulators working side-by-side with human operators. A challenging aspect of this coexistence is that the robot is required to reliably solve complex path-planning problems in a dynamically changing environment. To ensure the safety of the human operator while simultaneously achieving efficient task realization, this paper introduces a computationally efficient planning and control architecture that combines a Rapidly-exploring Random Tree (RRT) path planner with a trajectory-based Explicit Reference Governor (ERG) by means of a reference selector. The resulting scheme can steer the robot arm to the desired end-effector pose in the presence of actuator saturation, limited joint ranges, speed limits, a cluttered static obstacle environment, and moving human collaborators. The effectiveness of the proposed framework is experimentally validated on the Franka Emika Panda robot arm and fed with feedback information from state-of-the-art depth perception systems. Our method outperforms both the standalone RRT and ERG algorithms in cluttered static environments where it overcomes: i) the RRT's inability to handle dynamic constraints which result in constraint violations and ii) the ERG's undesirable property of getting trapped in local minima. Finally we employed the RRT+ERG in highly dynamic human-robot coexistence experiments without sacrificing the real-time requirements. 𝐕𝐢𝐝𝐞𝐨 𝐜𝐨𝐧𝐭𝐞𝐧𝐭 is listed below, so you can redirect to the part you are interested in by clicking on the respective times. 0:40 Introduction Trajectory-based Explicit Reference Governor 2:39 Introduction 3:04 Explanation of the algorithm 7:05 Experimental HRC validations from our previous work 7:58 Local minima problems Rapidly-exploring Random Tree + Trajectory-based Explicit Reference Governor 8:29 Introduction 8:55 Explanation of the algorithm 12:18 HRC in a simple primitive-shaped obstacle scene 13:58 HRC in a more complex primitive-shaped obstacle scene 17:05 HRC in an OctoMap obstacle scene
Comments






![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)