Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation скачать в хорошем качестве
Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation в качестве 4k
У нас вы можете посмотреть бесплатно Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Deep Reinforcement Learning-based Obstacle Avoidance in Continuous Navigation
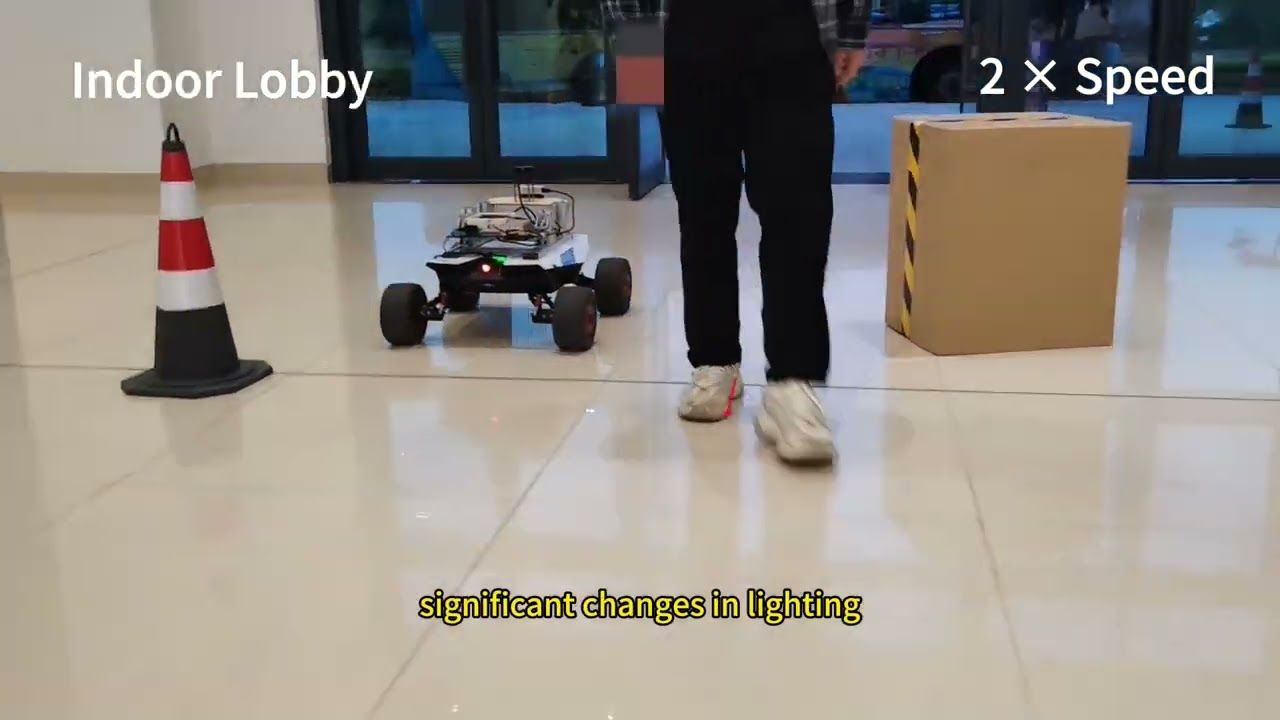
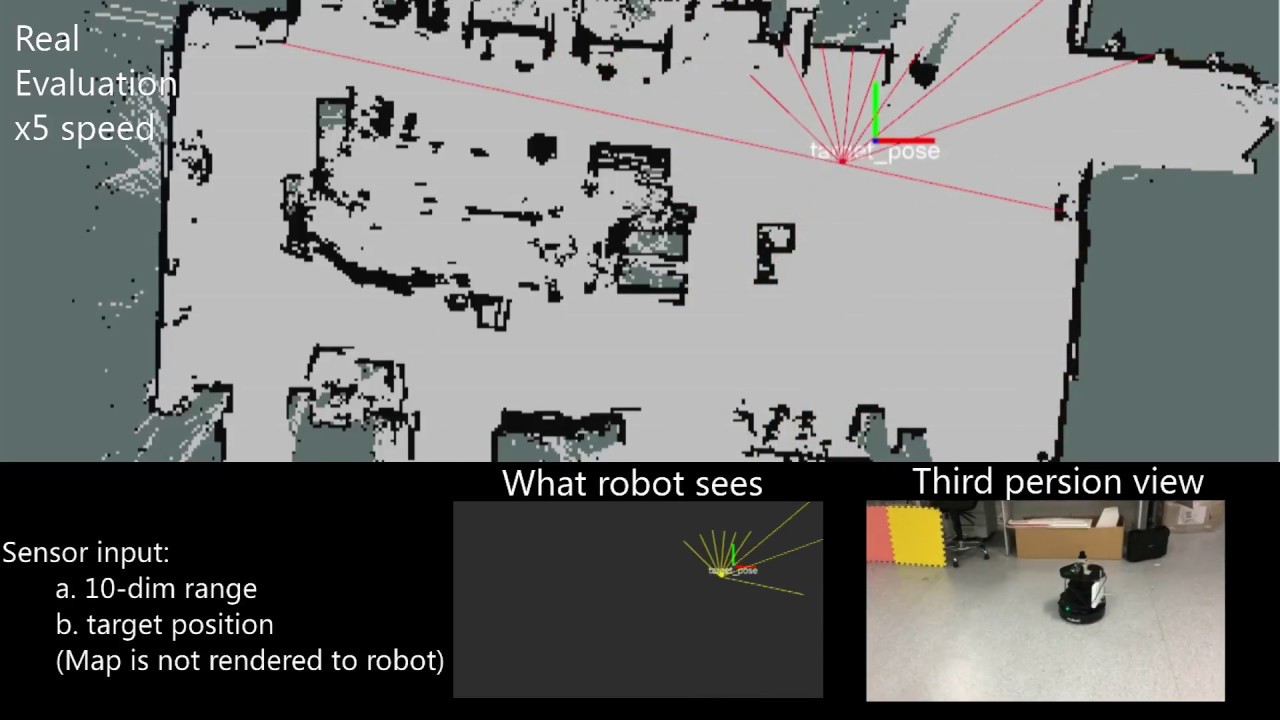
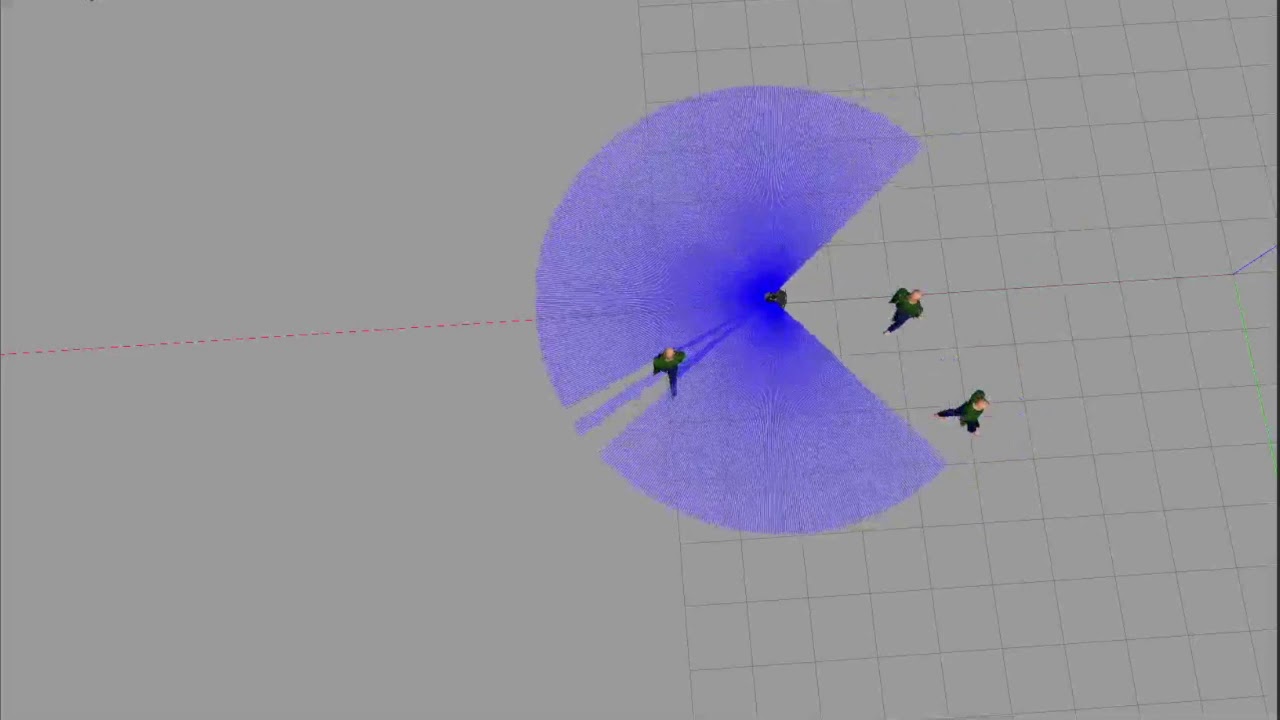
A goal-driven autonomous mapping and exploration system that combines reactive and planned robot navigation. First, a navigation policy is learned through a deep reinforcement learning framework in a simulated environment. This policy guides an autonomous agent towards a goal while avoiding obstacles. We develop a navigation system where this learned policy is integrated into a motion planning stack as the local navigation layer to move the robot towards the intermediate goals. A global path planner is used to mitigate the local optimum problem and guide the robot towards the global goal. Possible intermediate goal locations are extracted from the environment and used as local goals according to the navigation system heuristics. The fully autonomous navigation is performed without any prior knowledge while mapping is performed as the robot moves through the environment. After reaching the goal, navigation continues between the point of origin. A plan is first obtained from a path planner in the newly explored map, and navigation is carried out by DRL network. More information at: https://github.com/reiniscimurs/GDAM
Comments