DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles скачать в хорошем качестве
DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles в качестве 4k
У нас вы можете посмотреть бесплатно DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
DWA-RL: Dynamically Feasible Deep RL Policy for Robot Navigation among Mobile Obstacles
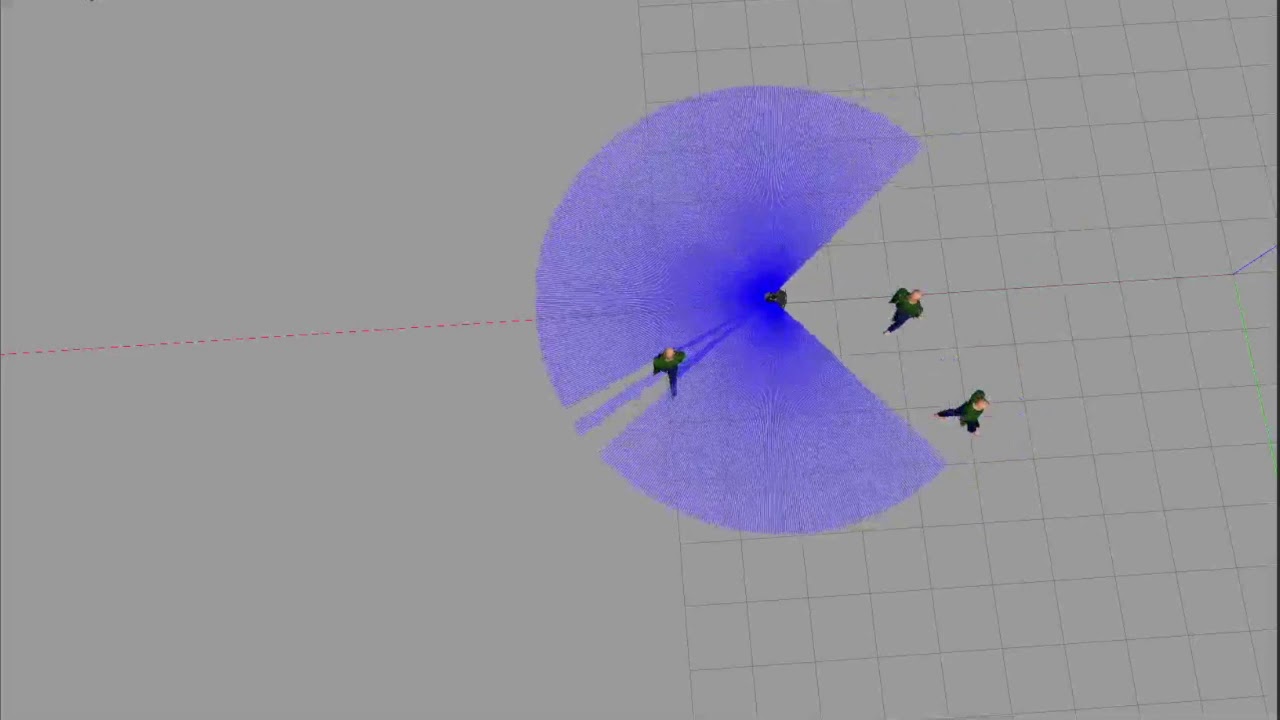
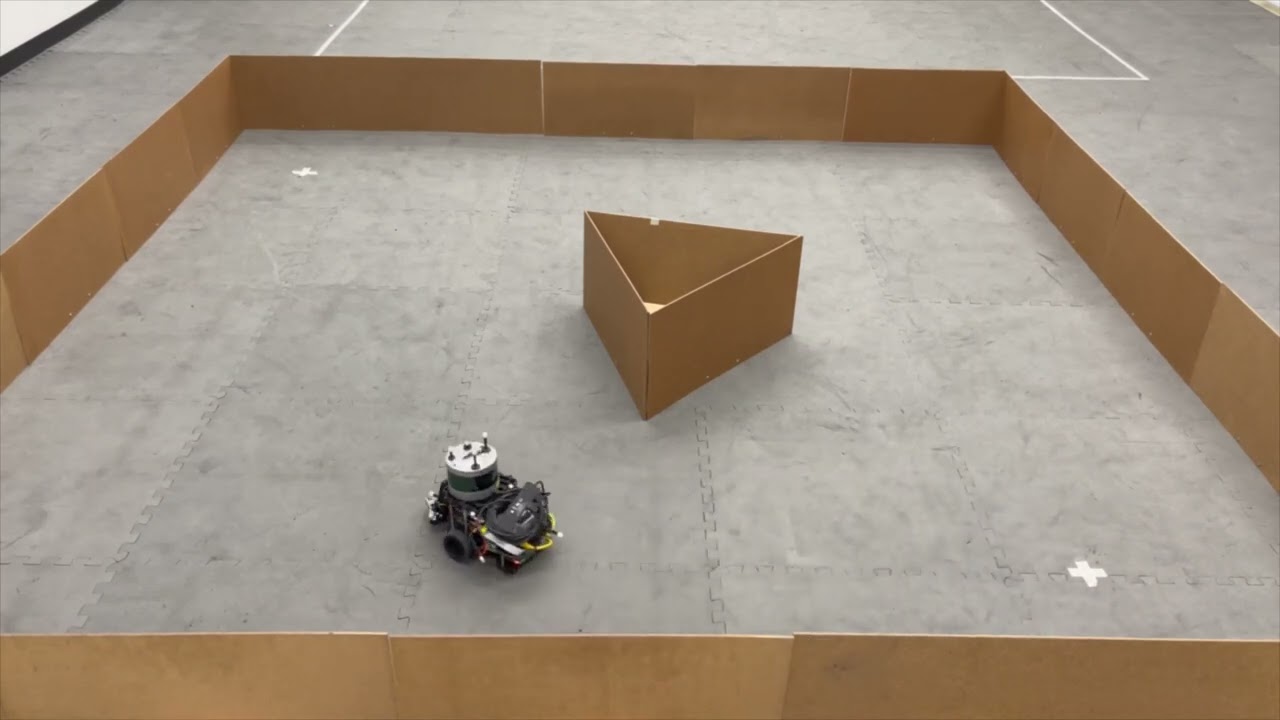
We present a novel Deep Reinforcement Learning (DRL) based policy to compute dynamically feasible and spatially aware velocities for a robot navigating among mobile obstacles. Our approach combines the benefits of the Dynamic Window Approach (DWA) in terms of satisfying the robot's dynamics constraints with state-of-the-art DRL-based navigation methods that can handle moving obstacles and pedestrians well. Our formulation achieves these goals by embedding the environmental obstacles' motions in a novel low-dimensional observation space. It also uses a novel reward function to positively reinforce velocities that move the robot away from the obstacle's heading direction leading to significantly lower number of collisions. We evaluate our method in realistic 3-D simulated environments and on a real differential drive robot in challenging dense indoor scenarios with several walking pedestrians. We compare our method with state-of-the-art collision avoidance methods and observe significant improvements in terms of success rate (up to 33% increase), number of dynamics constraint violations (up to 61% decrease), and smoothness. We also conduct ablation studies to highlight the advantages of our observation space formulation, and reward structure.
Comments













![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)