Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles скачать в хорошем качестве
Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles в качестве 4k
У нас вы можете посмотреть бесплатно Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Occlusion-Aware MPC for Guaranteed Safe Robot Navigation with Unseen Dynamic Obstacles
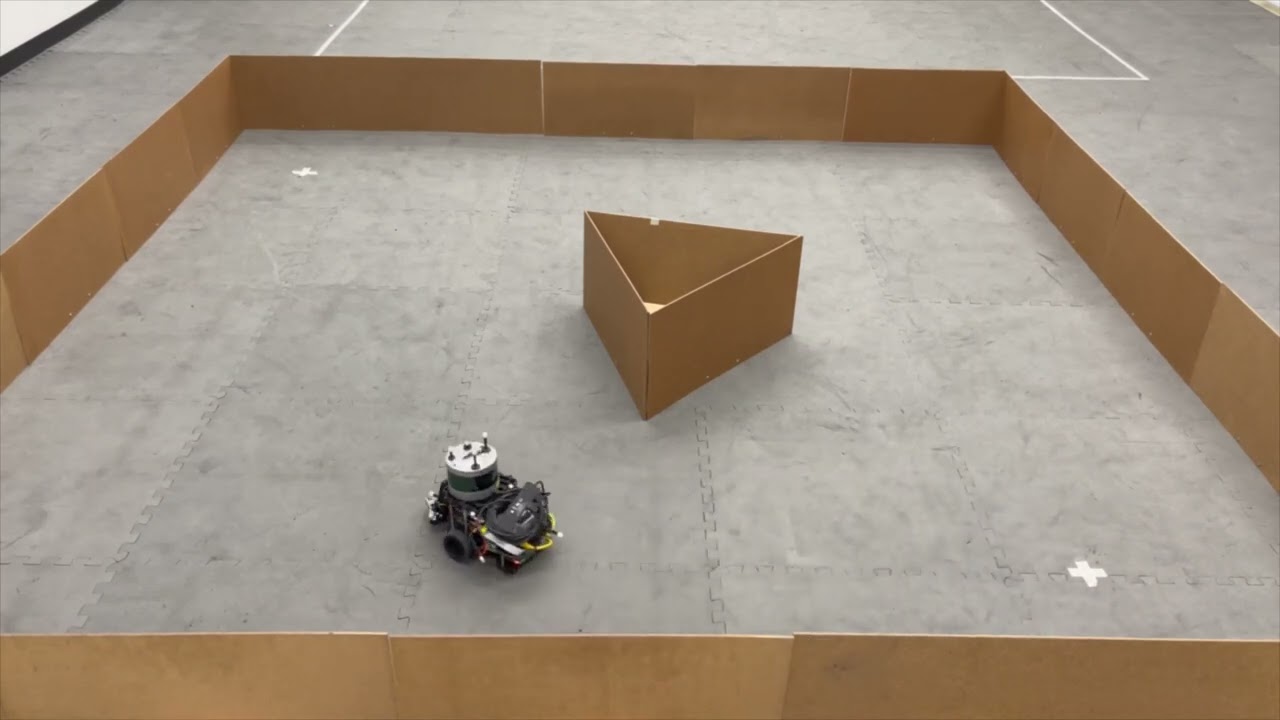
For safe navigation in dynamic uncertain environments, robotic systems rely on the perception and prediction of other agents. Particularly, in occluded areas where cameras and LiDAR give no data, the robot must be able to reason about potential movements of invisible dynamic agents. This work presents a provably safe motion planning scheme for real-time navigation in an a priori unmapped environment, where occluded dynamic agents are present. Safety guarantees are provided based on reachability analysis. Forward reachable sets associated with potential occluded agents, such as pedestrians, are computed and incorporated into planning. An iterative optimization-based planner is presented that alternates between two optimizations: nonlinear Model Predictive Control (NMPC) and collision avoidance. Recursive feasibility of the MPC is guaranteed by introducing a terminal stopping constraint. The effectiveness of the proposed algorithm is demonstrated through simulation studies and hardware experiments with a TurtleBot robot. The paper is available at https://arxiv.org/abs/2211.09156
Comments