The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown скачать в хорошем качестве
The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown
7 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown в качестве 4k
У нас вы можете посмотреть бесплатно The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
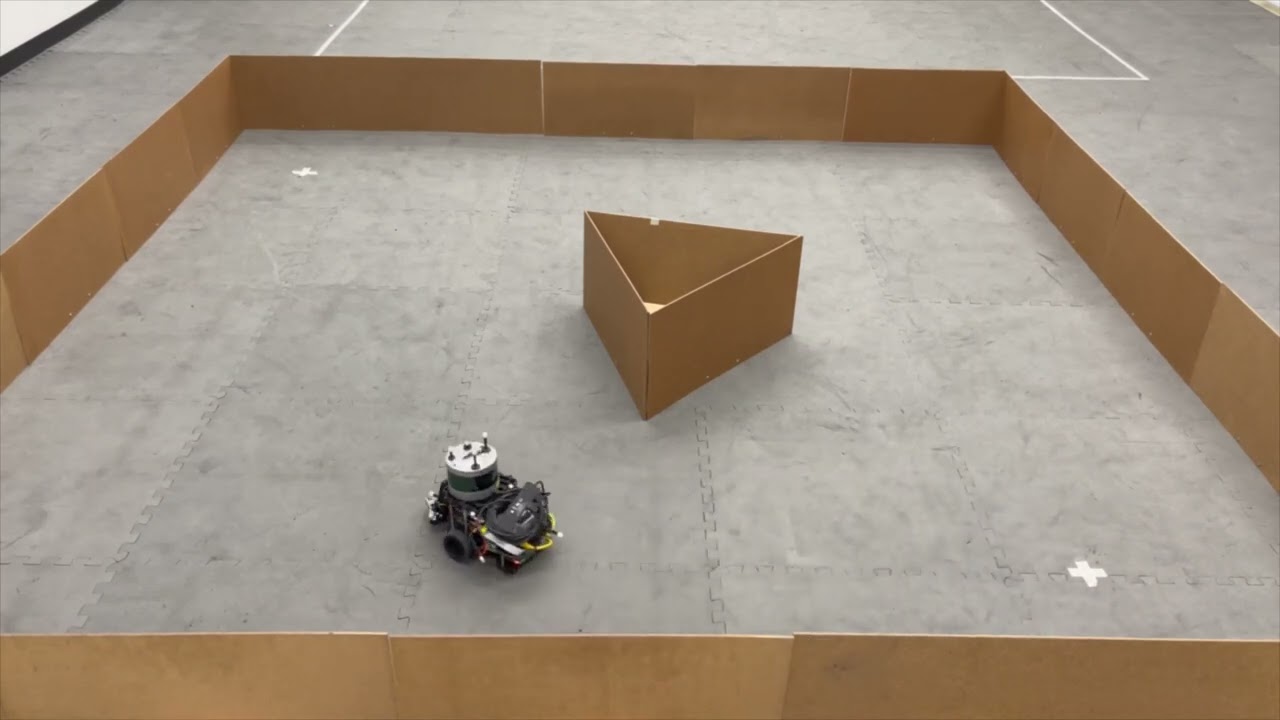
The Obstavoid Algorithm dynamic obstacle avoidance in Duckietown
Alessandro Morra, Dominik Mannhart, Lionel Gulich, Victor Klemm from ETH Zurich use 3D space-time grid, cost function modeling, and Dijkstra's algorithm to avoid static and dynamic obstacles in a compliant Duckietown. Check out the full project: https://duckietown.com/obstavoid-dyna... Visit our page for other interesting student projects on robot autonomy: https://duckietown.com/best-robotics-... Our Github repository: https://github.com/duckietown/duckiet... LinkedIn: https://bit.ly/2MnEYM6 Twitter: / duckietownai Facebook: https://bit.ly/2B7jRcB
Comments
















![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)
