비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축 скачать в хорошем качестве
비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축
4 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축 в качестве 4k
У нас вы можете посмотреть бесплатно 비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
비전-언어-액션 모델 기반 로봇 매니퓰레이션 - #01 개발환경 구축
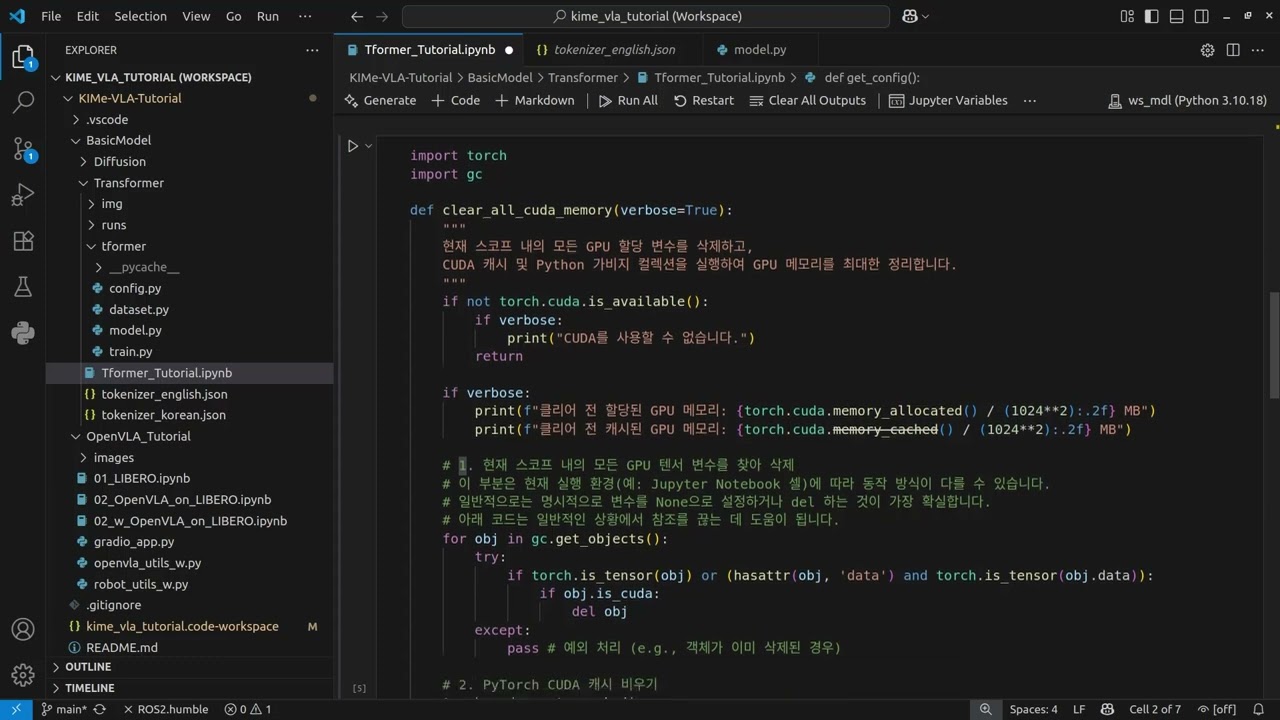
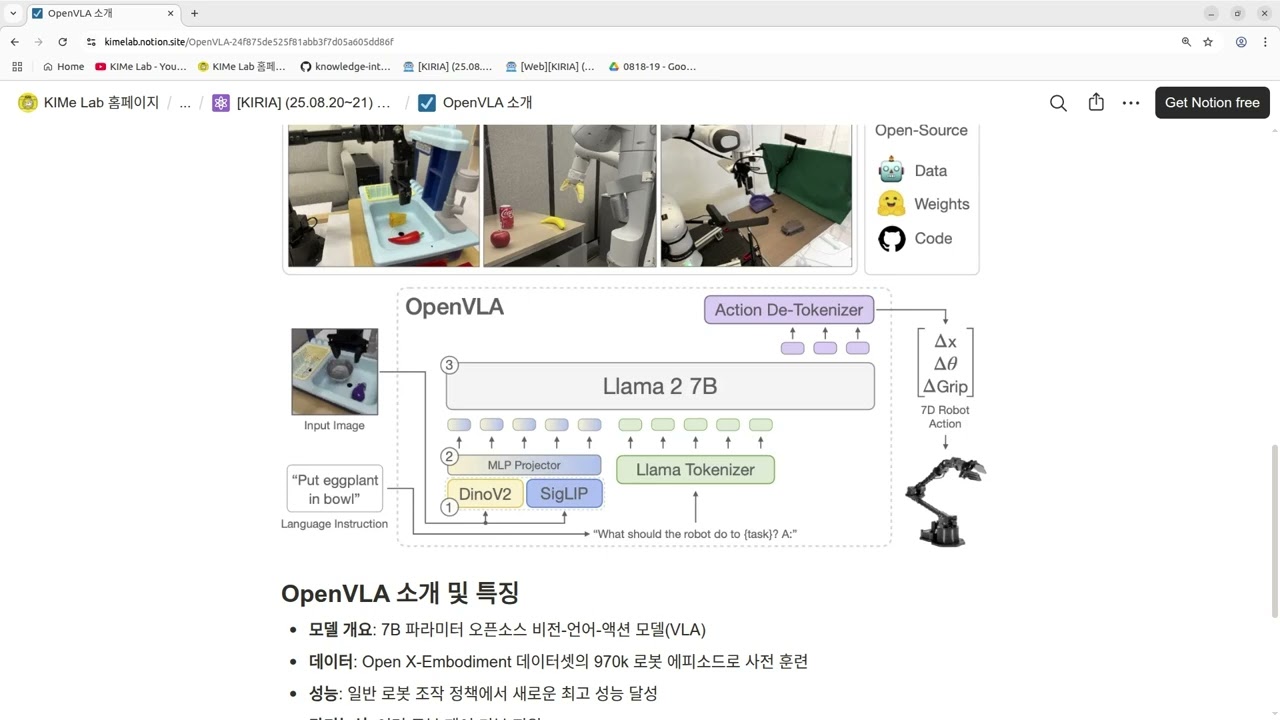
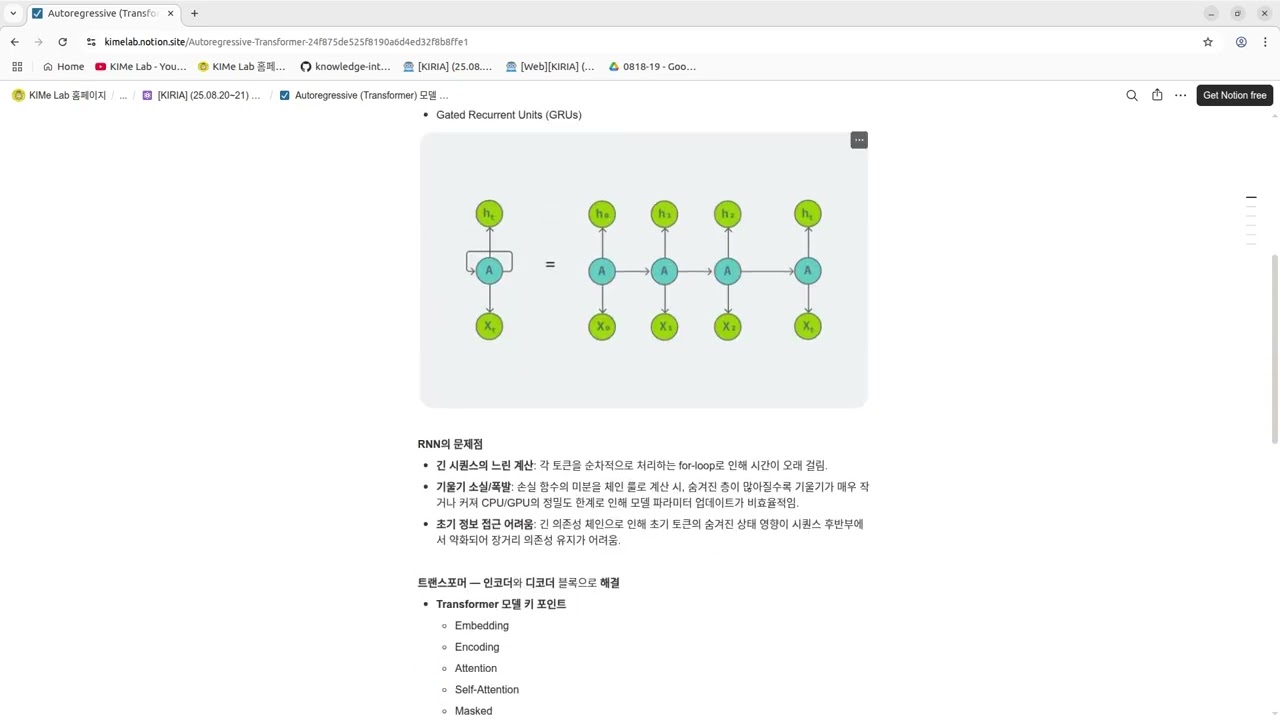
[설명] [VLA 기반 로봇 매니퓰레이션] #01 개발환경 구축 : 비전-언어-액션(VLA) 모델 기반 로봇 매니퓰레이션 실습 진행을 위한 Conda 환경 구축 및 Pytorch 설치 방법 설명 [목차] * 1. 개발환경 구축 2. Autoregressive (Transformer) 모델 3. Diffusion 모델 4. OpenVLA & LIBERO 소개 및 개발환경 구축 5. OpenVLA 및 LIBERO 실습 6. GR00T N1.5 구동 실습 [연구실 소개] 지식-지능형 메카트로닉스 연구실 (KIMe Lab) Knowledge-Intelligence Mechatronics Laboratory (https://kimelab.notion.site/) [자료] 비전-언어-액션 모델 기반 로봇 매니퓰레이션 강의 자료 - https://kimelab.notion.site/KIRIA-25-...
Comments