Mathematics in Robotics : Go to Goal in ROS2 скачать в хорошем качестве
Mathematics in Robotics : Go to Goal in ROS2
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Mathematics in Robotics : Go to Goal in ROS2 в качестве 4k
У нас вы можете посмотреть бесплатно Mathematics in Robotics : Go to Goal in ROS2 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Mathematics in Robotics : Go to Goal in ROS2 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
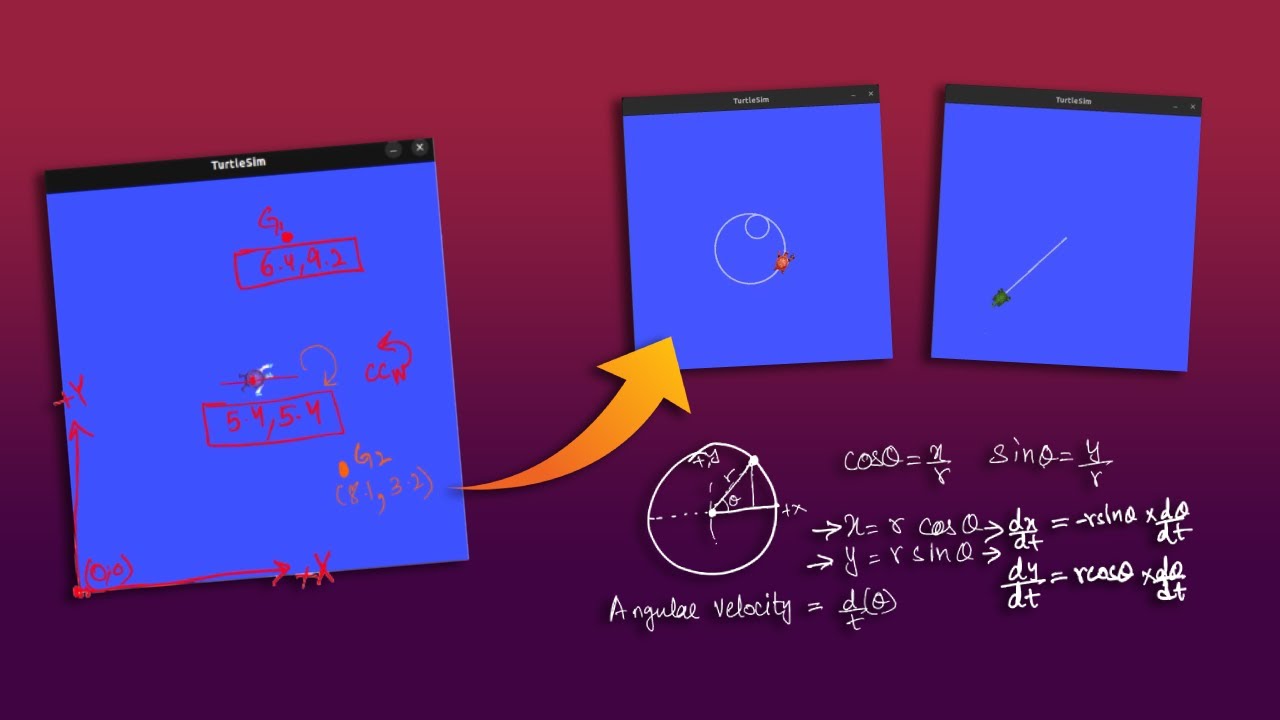
Mathematics in Robotics : Go to Goal in ROS2
Euclidean distance is explained in step by step approach using ROS2 package turtlesim. In path planning, the Euclidean distance is used to determine the shortest path between two points in a three-dimensional space. In obstacle avoidance, it is used to detect the distance between a robot and an obstacle, enabling the robot to avoid collisions. 📝 Online School : https://www.robotisim.com/ 🎥 Youtube Playlist : • Плейлист 👨💻 Github Repository Link : https://github.com/noshluk2/ros2_lear... 🤓 Lets join on Discord : / discord 🖐My Social Profiles : Linkedin: / muhammad-luqman-9b227a11b Twitter: / noshluk2 Facebook Group : / roboticswithluqman #ros2 #robotics #gazebo #autonomousrobot #trutlesim
Comments



![ros2_control with ROS2 [1h20 Crash Course]](https://imager.clipsaver.ru/B9SbYjQSBY8/max.jpg)


![F1tenth (F1/10) Lecture 9] ROS Transformations and Coordinate Frames](https://imager.clipsaver.ru/XCVtCBbsfGU/max.jpg)





![Загадка, в которую невозможно поверить, даже если знаешь ответ [Veritasium]](https://imager.clipsaver.ru/wWQ9YdreY9c/max.jpg)




