[IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions скачать в хорошем качестве
[IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions
7 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
![[IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions](https://imager.clipsaver.ru/TbssD__hpCg/max.jpg)
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: [IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions в качестве 4k
У нас вы можете посмотреть бесплатно [IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон [IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
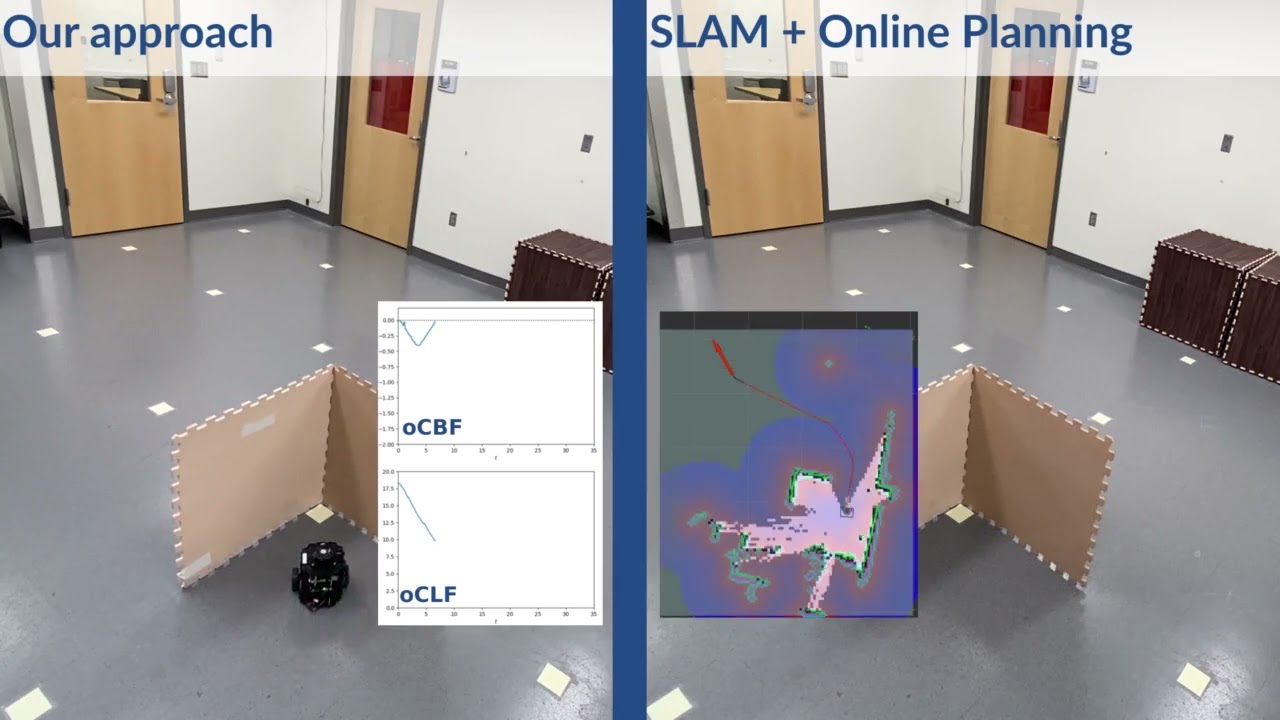
[IROS 2025] Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions
Safe, high-performance operational space control for robot manipulators. Deploy your learned policies, or teleoperate your robot confidently with OSCBF Extended supplemental material for "Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions" by Daniel Morton and Marco Pavone (IROS 2025, Hangzhou) Visit our project webpage for more details: https://stanfordasl.github.io/oscbf/
Comments





![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)




![[OOD Workshop @ RSS 2025] Huazhe Xu – Robot OOD Generalization Does Not Exist](https://imager.clipsaver.ru/sCzKjHBQSkM/max.jpg)




![[OOD Workshop @ RSS 2025] Andrea Bajcsy – How Should Robots Handle Out-of-Distribution Conditions?](https://imager.clipsaver.ru/6Iq5XfV3i4k/max.jpg)


