VPP-TC: Viability-Preserving Passive Torque Control скачать в хорошем качестве
VPP-TC: Viability-Preserving Passive Torque Control
11 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: VPP-TC: Viability-Preserving Passive Torque Control в качестве 4k
У нас вы можете посмотреть бесплатно VPP-TC: Viability-Preserving Passive Torque Control или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон VPP-TC: Viability-Preserving Passive Torque Control в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
VPP-TC: Viability-Preserving Passive Torque Control
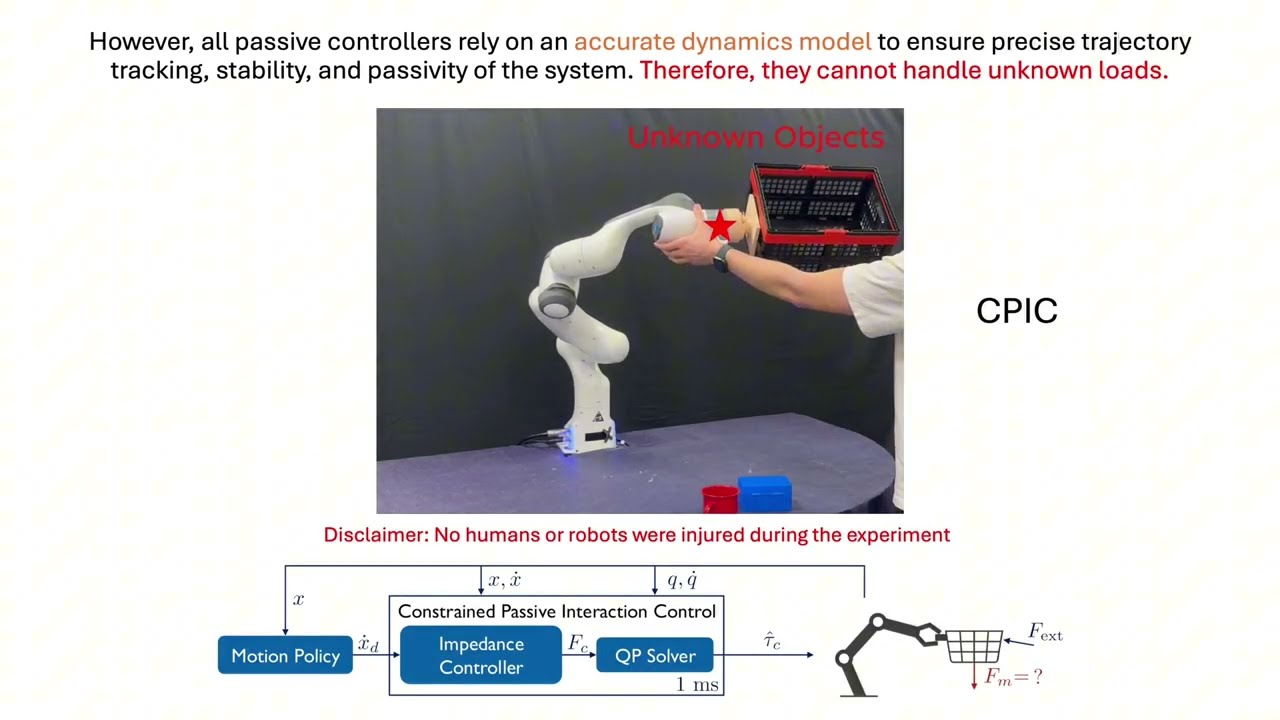
*To appear in IEEE-RAS International Conference on Robotics and Automation (ICRA 2026) Authors: Zizhe Zhang, Yicong Wang, Zhiquan Zhang, Tianyu Li, Nadia Figueroa Abstract: Conventional passivity-based torque controllers for manipulators are typically unconstrained, which can lead to safety violations under external perturbations. In this paper, we employ viability theory to pre-compute safe sets in the state-space of joint positions and velocities. These viable sets, constructed via data-driven and analytical methods for self-collision avoidance, external object collision avoidance and joint-position and joint-velocity limits, provide constraints on joint accelerations and thus joint torques via the robot dynamics. A quadratic programming-based control framework enforces these constraints on a passive controller tracking a dynamical system, ensuring the robot states remain within the safe set in an infinite time horizon. We validate the proposed approach through simulations and hardware experiments on a 7-DoF Franka Emika manipulator. In comparison to a baseline constrained passive controller, our method operates at higher control-loop rates and yields smoother trajectories. Paper: https://arxiv.org/abs/2510.03367
Comments










![[ICON Spring26 Seminar] Zhaoming Xie (RAI) #reinforcementlearning #mpc #robotics](https://imager.clipsaver.ru/vSnGj9FYs_U/max.jpg)






