Irrotational Contact Fields, An IEEE Transactions on Robotics Paper скачать в хорошем качестве
Irrotational Contact Fields, An IEEE Transactions on Robotics Paper
6 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Irrotational Contact Fields, An IEEE Transactions on Robotics Paper в качестве 4k
У нас вы можете посмотреть бесплатно Irrotational Contact Fields, An IEEE Transactions on Robotics Paper или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Irrotational Contact Fields, An IEEE Transactions on Robotics Paper в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Irrotational Contact Fields, An IEEE Transactions on Robotics Paper
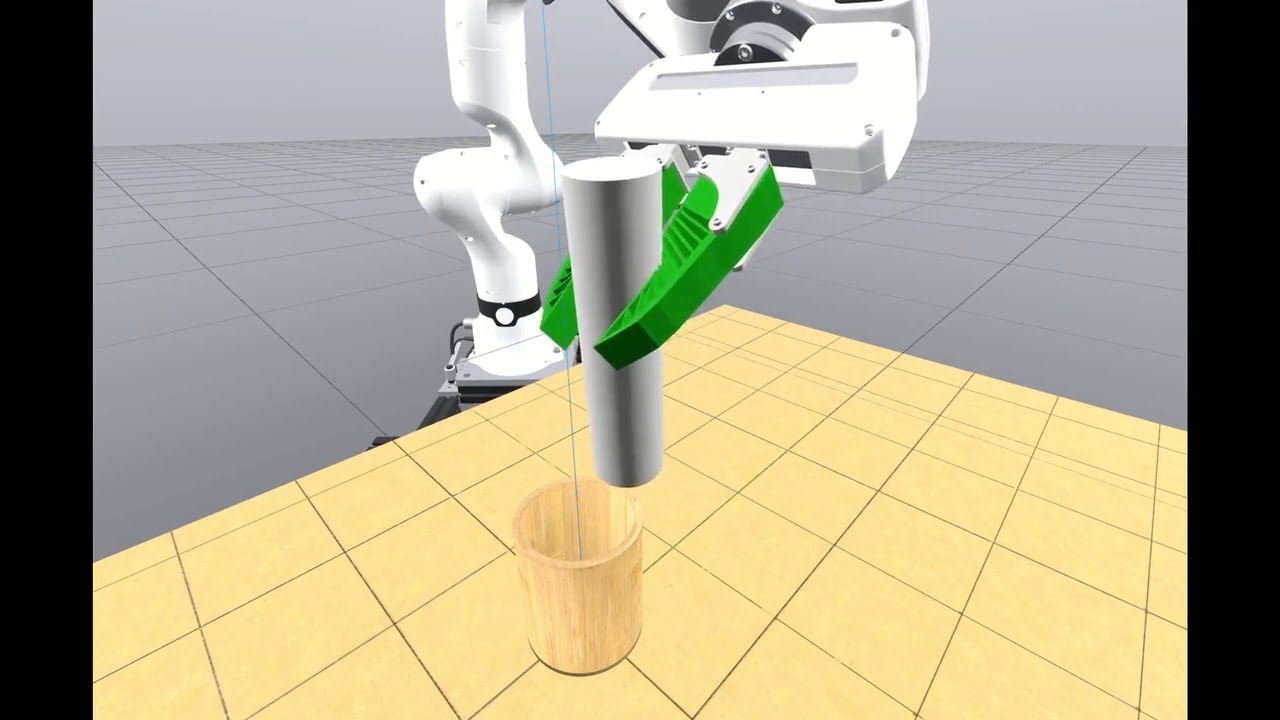
In this recent T-RO paper, the authors introduce Irrotational Contact Fields, a contact modeling framework that generates convex, physically accurate approximations of complex contact (including friction) and enables differentiable, artifact-free simulation in Drake, supporting robust sim-to-real transfer for contact-rich robotics tasks. This video provides a visual overview of the key contributions described in the author's manuscript. It includes an animation of the BarrettHand simulation, offering a clear illustration of the complex mechanics of this intricate robotic gripper. Additionally, the video features a demonstration of an iterative Linear Quadratic Regulator (iLQR) applied to a challenging arm manipulation task, highlighting the propagation of gradients through contact dynamics. Finally, it showcases a teleoperated simulation of a peg-in-hole task, demonstrating the ability of our method to model deformable objects in real time using Finite Element methods. These visualizations enhance the understanding of our framework and its practical applications in robotics. Paper title: Irrotational Contact Fields Authors: Alejandro Castro, Xuchen Han & Joseph Masterjohn Paper URL: https://ieeexplore.ieee.org/document/... #DexterousManipulation #ContactModeling #Irrotational
Comments















![Jak CIA i MI6 zdobyły informacje o zbliżającej się wojnie i dlaczego nikt im nie uwierzył [PODCAST]](https://imager.clipsaver.ru/r5gPE_cGx60/max.jpg)