MECH 516 Lecture# 10 .Source Panel Method with Matlab Code скачать в хорошем качестве
MECH 516 Lecture# 10 .Source Panel Method with Matlab Code
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: MECH 516 Lecture# 10 .Source Panel Method with Matlab Code в качестве 4k
У нас вы можете посмотреть бесплатно MECH 516 Lecture# 10 .Source Panel Method with Matlab Code или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон MECH 516 Lecture# 10 .Source Panel Method with Matlab Code в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
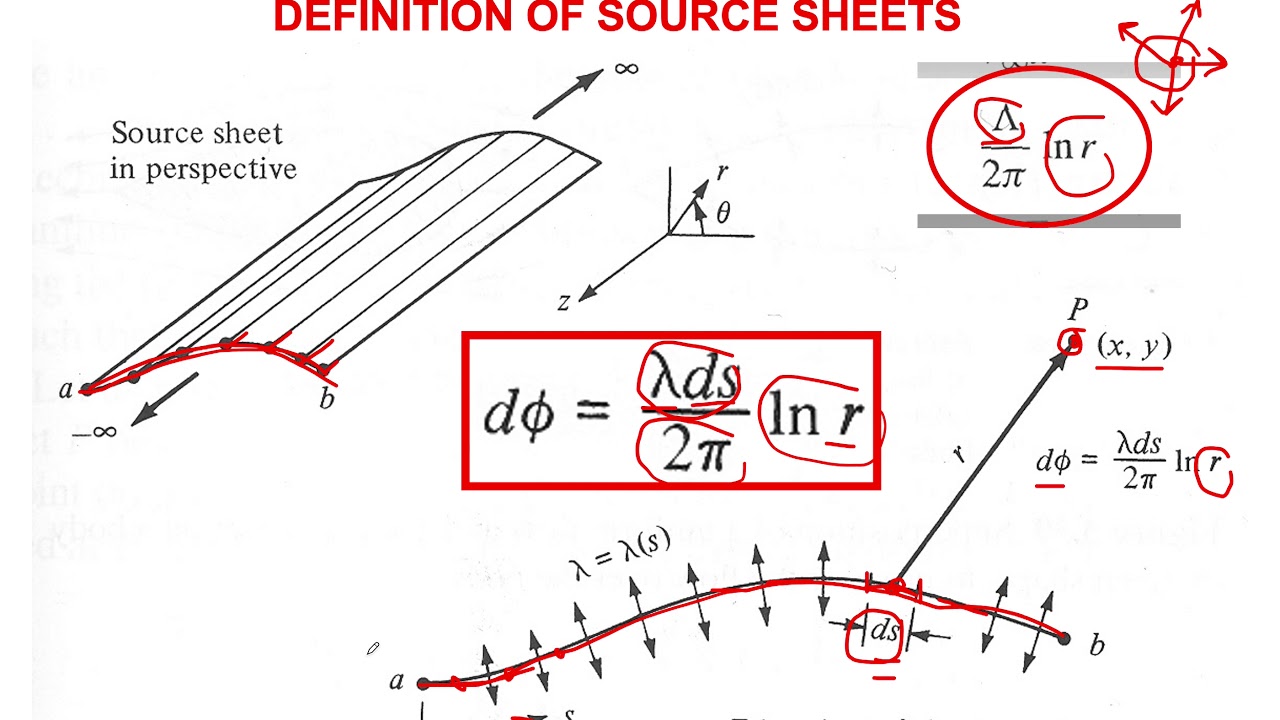
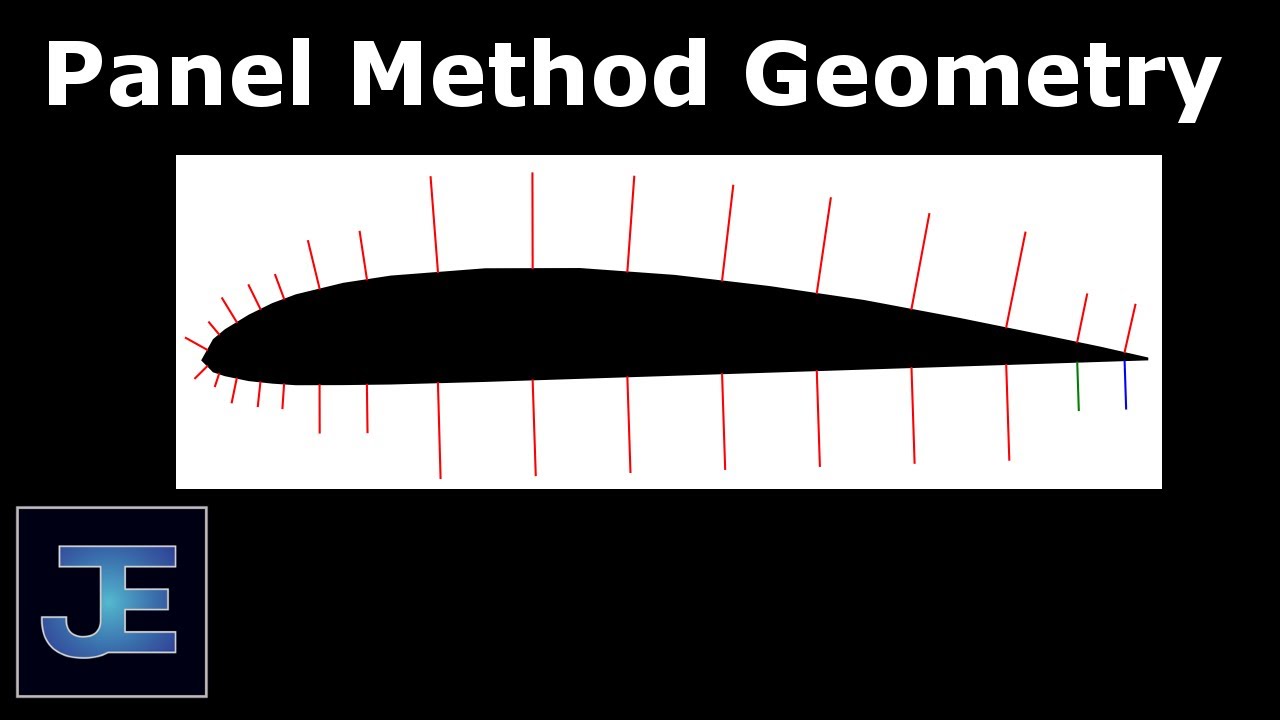
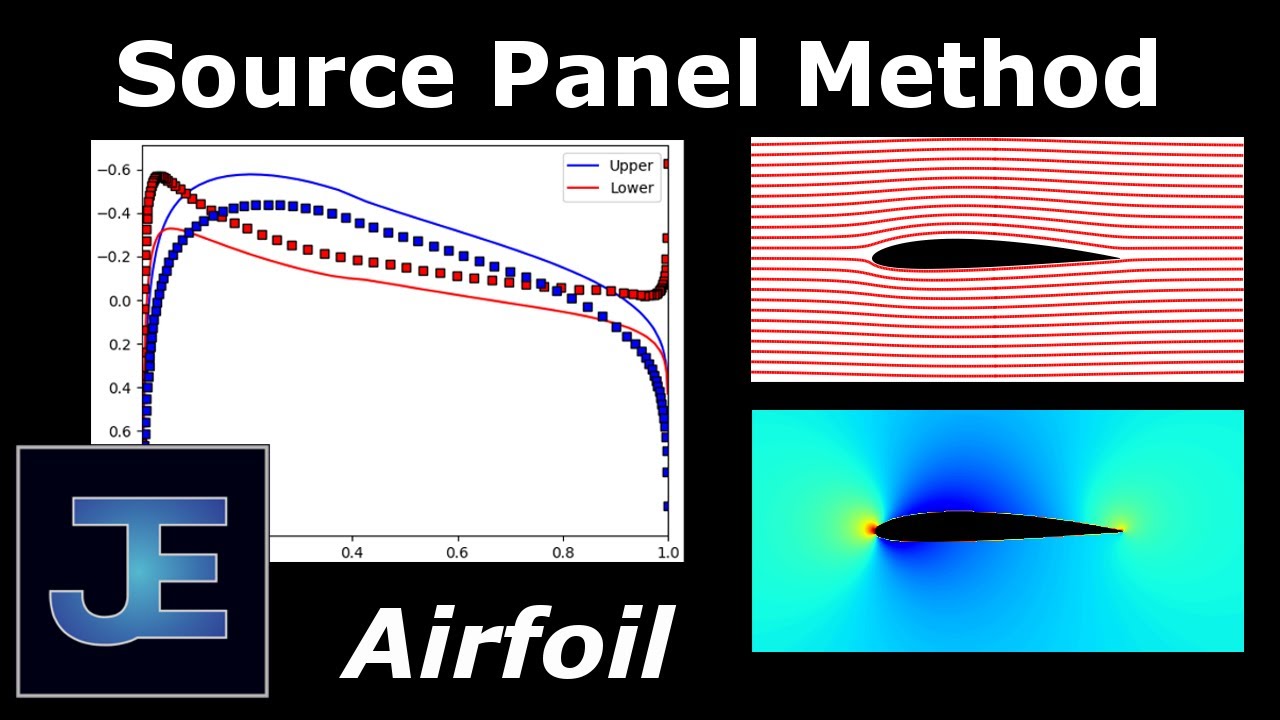
MECH 516 Lecture# 10 .Source Panel Method with Matlab Code
Source panel method with application to circular cylinder flow Note: In two lines in the code below replace .lt. with the angled bracket symbol because YT doesn't accept angled brackets CODE: close all clear clc V0=1; % free stream V_infinity alfa=0*pi/180; % freestream angle with the horziontal k=0; % Defining body geometry: circle R=1.0; step=-22.50/2; for thd=180 + step/2:step:-180 -step/2 k=k+1; % panel number k th=thd*pi/180; x(k)=R*cos(th); y(k)=R*sin(th); end % just for plotting x(k+1)=R*cos(th+step*pi/180); % just for plotting to close the body y(k+1)=R*sin(th+step*pi/180); % just for plotting to close the body % velocity at control point V(k)=0; % Defining control points for panels for i=1:1:k % panel edges X(i)=x(i); Y(i)=y(i); % control points (xcp,ycp) xcp(i)=( x(i) + x (i+1) )/2; ycp(i)=( y(i) + y (i+1) )/2; TH(i)=atan2(ycp(i),xcp(i)); % length of panel lngp(i)=sqrt(( x(i) - x (i+1))^2 + (y(i) - y (i+1))^2); % slope of panel (angle with the horizontal, from LE) phi(i)= atan2(( y(i+1) - y (i) ),( x(i+1) - x (i) )); end X(i+1)=x(i+1); Y(i+1)=y(i+1); %X(i+2)=x(1); %Y(i+2)=y(1); %xcp(i+1)=( x(i+1) + x (i+2) )/2; %ycp(i+1)=( y(i+1) + y (i+2) )/2; %TH(i+1)=atan2(ycp(i+1),xcp(i+1)); %lngp(i+1)=sqrt(( x(i+2) - x (i+1))^2 + (y(i+2) - y (i+1))^2); %phi(i+1)= atan(( y(i+2) - y (i+1) )/( x(i+2) - x (i+1) )); figure plot(x,y) axis([-4 4 -4 4]*.4) axis square text(xcp*1.1,ycp*1.1,num2str(round(phi'*1800/pi)/10)) hold on plot(xcp,ycp,'r.') xlabel('x','FontWeight','bold');ylabel('y','FontWeight','bold'); title('labels: angle: \phi','FontWeight','bold') figure plot(x,y) axis([-4 4 -4 4]*.4) axis square text(xcp*1.1,ycp*1.1,num2str(round(TH'*1800/pi)/10)) hold on plot(xcp,ycp,'r.') xlabel('x','FontWeight','bold');ylabel('y','FontWeight','bold'); title('labels: angle: \theta','FontWeight','bold') %beta: angle between panel normal and the freestream beta= phi - alfa + pi/2; % Setting up the linear system of equations (source panels) for i=1:1:k for j=1:1:k if j~=i A=-(xcp(i)-X(j))*cos(phi(j))... -(ycp(i)-Y(j))*sin(phi(j)); B=(xcp(i)-X(j))^2 + (ycp(i)-Y(j))^2; C=sin(phi(i)-phi(j)); D=(ycp(i)-Y(j))*cos(phi(i))... -(xcp(i)-X(j))*sin(phi(i)); S(j)=sqrt( (X(j+1)-X(j))^2 ... (Y(j+1)-Y(j))^2 ); E=sqrt(B-A^2); I(i,j)=C/2*log( (S(j)^2+ 2*A*S(j)+B)/B )... +(D-A*C)/E* (atan2((S(j)+A),E)... -atan2(A,E)); a(i,j)=1/(2*pi)*I(i,j); % I(i,j)= Integral[(d/dn_i(ln r_i,j))]ds if i==4 & j==2 [A B C D S(j) E]; end elseif i==j a(i,j)=1/2; end end b(i)=V0*cos(beta(i)); end % solving the linear system of equations for lambda % a * lambda + b = 0 lambda=linsolve(a,-b'); dum=lambda/(2*pi*V0); figure plot(x,y) hold on plot(xcp,ycp,'r.') text(xcp*1.1,ycp*1.1,num2str(round(dum*1e4)/1e4)) xlabel('x','FontWeight','bold');ylabel('y','FontWeight','bold'); title('labels: \lambda / (2\pi V_{\infty})','FontWeight','bold') axis([-4 4 -4 4]*.4) axis square %%%% PART 2 --- Evaluating the velocity at the control pts for i=1:1:k for j=1:1:k if i~=j A=-(xcp(i)-X(j))*cos(phi(j))... -(ycp(i)-Y(j))*sin(phi(j)); B=(xcp(i)-X(j))^2 + (ycp(i)-Y(j))^2; C=sin(phi(i)-phi(j)); D=(ycp(i)-Y(j))*cos(phi(i))... -(xcp(i)-X(j))*sin(phi(i)); S(j)=sqrt( (X(j+1)-X(j))^2 ... (Y(j+1)-Y(j))^2 ); E=sqrt(B-A^2); J(i,j)=((D-A*C)/(2*E))*log( (S(j)^2+ 2*A*S(j)+B)/B )... C * (atan2((S(j)+A),E)- atan2(A,E)); a(i,j)=1/(2*pi)*I(i,j); % the velocity at the control point V(i)=V(i) + lambda(j)/(2*pi)*J(i,j); end end V(i)= V(i) + V0*sin(beta(i)); cp(i)=1-(V(i)/V0)^2; end for i=1:1:size(phi,2) for j=i+1:1:size(phi,2) % YouTube Error: lt: replace with less than if phi(j) .lt. phi(i) dum1=phi(i); phi(i)=phi(j); phi(j)=dum1; dum1=TH(i); TH(i)=TH(j); TH(j)=dum1; dum1=cp(i); cp(i)=cp(j); cp(j)=dum1; end end end figure, plot(phi*180/pi,cp,'x-') xlabel('\phi','FontWeight','bold');ylabel('C_p','FontWeight','bold'); title('C_p','FontWeight','bold') for i=1:1:size(TH,2) for j=i+1:1:size(TH,2) % YouTube Error: lt: replace with less than if TH(j) .lt. TH(i) dum1=TH(i); TH(i)=TH(j); TH(j)=dum1; dum1=cp(i); cp(i)=cp(j); cp(j)=dum1; end end end figure, plot(TH*180/pi,cp,'x-') xlabel('\theta','FontWeight','bold'); ylabel('C_p','FontWeight','bold'); %title('C_p')
Comments














![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)
