Complex Urban LiDAR Data Set скачать в хорошем качестве
Complex Urban LiDAR Data Set
7 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Complex Urban LiDAR Data Set в качестве 4k
У нас вы можете посмотреть бесплатно Complex Urban LiDAR Data Set или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Complex Urban LiDAR Data Set в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
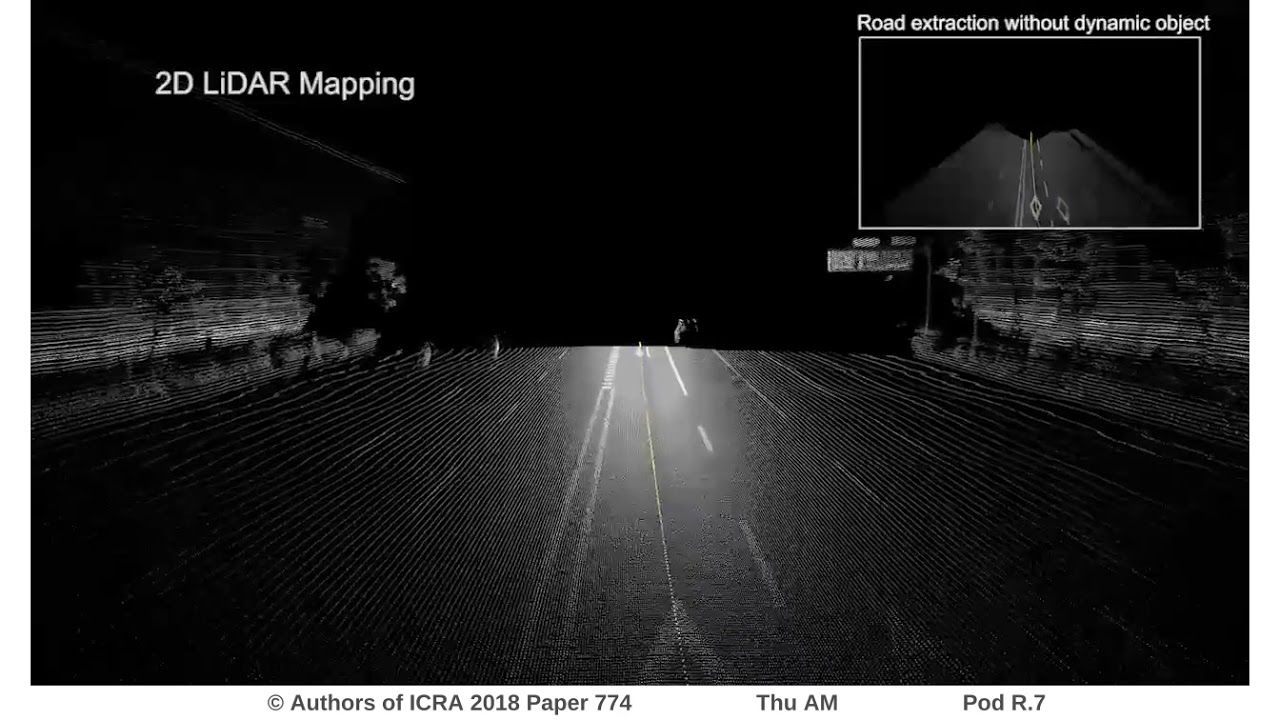
Complex Urban LiDAR Data Set
ICRA 2018 Spotlight Video Interactive Session Thu AM Pod R.7 Authors: Jeong, Jinyong; Cho, Younggun; Shin, Young-Sik; roh, hyunchul; Kim, Ayoung Title: Complex Urban LiDAR Data Set Abstract: This paper presents a Light Detection and Ranging (LiDAR) data set that targets complex urban environments. Urban environments with high-rise buildings and congested traffic pose a significant challenge for many robotics applications. The presented data set is unique in the sense it is able to capture the genuine features of an urban environment (e.g. metropolitan areas, large building complexes, underground parking lots). Data of two-dimensional (2D) and three-dimensional (3D) LiDAR, which are typical types of LiDAR sensors, are provided in the data set. The two 16-ray 3D LiDARs are tilted on both sides for maximal coverage. One 2D LiDAR faces backward while the other faces forwards to collect data of roads and buildings, respectively. Raw sensor data from Fiber Optic Gyro (FOG), Inertial Measurement Unit (IMU), and the Global Positioning System (GPS) are presented in a file format for vehicle pose estimation. The pose information of the vehicle estimated at 100 Hz is also presented after applying the graph simultaneous localization and mapping (SLAM) algorithm. For the convenience of development, the file player and data viewer in Robot Operating System (ROS) environment were also released via the Github web page. The full data sets are available at: http://irap.kaist.ac.kr/dataset. In this website, 3D preview of each data set is provided via WebGL.
Comments