Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot?? скачать в хорошем качестве
Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot??
13 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot?? в качестве 4k
У нас вы можете посмотреть бесплатно Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot?? или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot?? в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Why This Delta Robot Would Fail in Space?? Why I Built This 3D Industrial Pick-and-Place Robot??
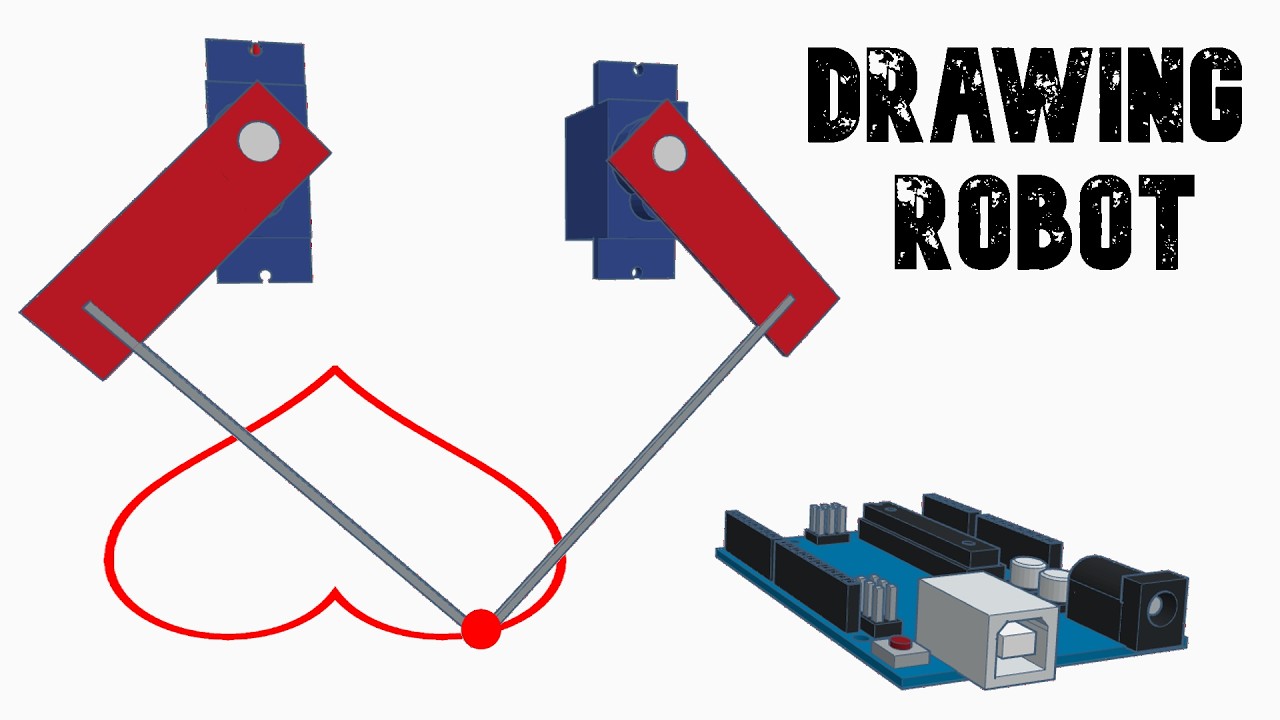
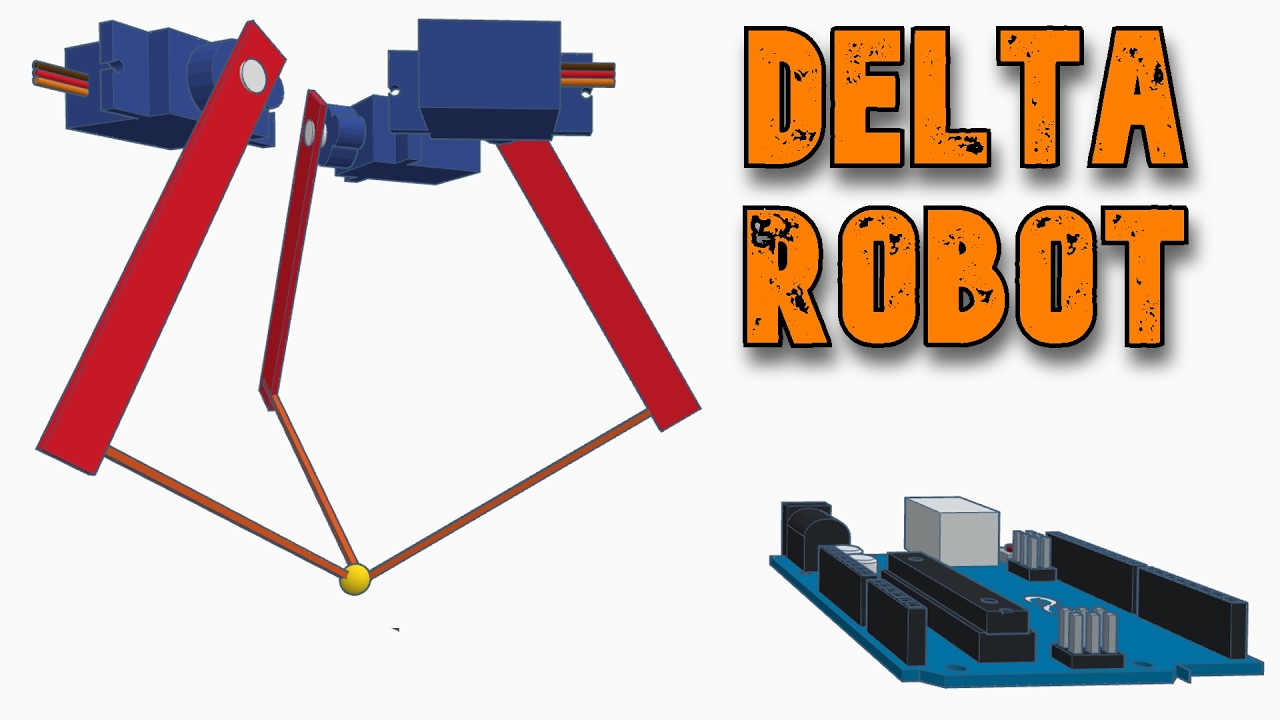
In this video I build a Hybrid Delta Robot using Arduino and servo motors. We explore CAD design, inverse kinematics, workspace simulation in Python, and why this cable-based delta robot cannot work in zero gravity. I have made this hybrid delta robot. This type of robot is used as pick and place robot in factories. But do you know why this robot cannot operate in space without gravity? And, do you know why it is not a complete delta robot? But a hybrid one? lets see. So, I wanted to make a robot that operates in 3 dimensions, and it should be lightweight. So this robot with this design satisfies all these requirements. So I made this robot, it is a hybrid of a cable robot and a delta robot, with the benefits of both. This is the partial C.A.D. design of our robot. We can see 3 servo motors, with a solid link attached to their horns. And we can see the movement of the links. Cable attachment to the links is now shown here. In the previous video, we had made a delta robot, but it had two motors, so its end-effector could only move in two dimentinal plane. For this robot, I took three motors. I arranged them on a plane with an angle of 120 degrees between each other. A solid link is connected at the horn of each motor. This is the circuit schematic. Here, we have three servo motors. These motors are connected to arduino uno r3 prototyping board. I tried doing the same in the real world as a simulation. I tested one motor. Two motors at a time. All three motors at a time. I thought it would be easy; if one and two are working, then all 3 should work, but I was wrong. Later, I inverted the plane, and the motors were upside down. This is how a delta robot should be. And here we have connected a thread between the links. The L.ED. indicates the end effector. This is the workspace of our end-effector of our delta robot as per our Python-based simulation. It is kind of bowl-shaped due to limitations of our motors; it should be kind of bell-shaped. But are these simulations accurate in the real world? Simulations are mostly accurate. Our robot is working in the same workspace as the simulated one. New lets check the extremities that this robot can reach. The topmost point. The bottom-most point. The most distant point from the centre point of the robot workspace. It can reach all their points, and of course, all the points in between. We just need to tune our inverse kinematics algorithm to output the desired angle for the motors, and the robot will reach that point. It is called a hybrid because it is cable instead of a second solid link. Three motors and their links provide forces in three dimensions, ns and the gravitational force is the fourth force. Gravity is the one responsible for keeping the cables tight. So, this robot will not work on internationa spcace station, there we will definitely need a pure delta robot. We can improve this project by using metal gear servo motors, a rigid plastic link and a fishing line as a cable with proper tension. We would also need to improve our algorithm. We could also add a motor on the solid links to wind and unwind the cable, so as to control the end effector in a new degree of freedom. But for now, I am satisfied with this robot. Best Engineering Project. BE final year Project Easy. Best BE Arduino Projects.Engineering Arduino Easy Project with code. How to make Engineering projects easy. Electrical Engineering Projects with Arduino & code. Electronics Engineering Projects with Arduino & code. Electronics Engineering Final Year Projects with Arduino & code. Arduino Robotics Projects with Code. Arduino Easy Robot projects. How to make an Arduino project. Arduino project tutorial for beginners. Arduino engineering projects, Arduino home projects, projects with Arduino Uno. Arduino's latest projects. simple Arduino-based project. Delta Robot Reference: https://en.wikipedia.org/wiki/Delta_r... Chapters: 00:00 Meet My Hybrid Delta Robot 00:17 Why I Built This 3D Pick-and-Place Robot at Home? 00:32 Inside the CAD Design of the Industrial Delta Robot 00:45 Building the Real Delta Robot as per CAD 00:57 My Previous 2D Delta Robot Project Video 01:05 The Circuit Diagram Of the Arduino Servo Motor Delta Robot Explained 01:14 Wiring the Real Robot Delta Robot (Electronics Setup) 01:17 Testing Servo Motors One by One 01:31 The Critical Fix: Inverting the Delta Robot 01:43 Python Simulation: Delta Robot Workspace Simulation 01:59 Testing the Delta Robot’s Extreme Reach 02:29 Why This Is a Hybrid Delta Robot? 02:40 Why This Delta Robot Cannot Work in Space? 02:50 Future Improvements for the Arduino Controlled and Servo Motor Powered Robot Topics Covered: Hybrid Delta Robot Design Arduino Servo Motor Control Cable-Driven Robot Mechanism CAD Design for Robotics Python Robot Workspace Simulation Inverse Kinematics for Delta Robots Testing Robot Workspace Limits Why Cable Robots Need Gravity Robotics EveryDay!!!
Comments