D.3 SOTIF considerations for maps скачать в хорошем качестве
D.3 SOTIF considerations for maps
11 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: D.3 SOTIF considerations for maps в качестве 4k
У нас вы можете посмотреть бесплатно D.3 SOTIF considerations for maps или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон D.3 SOTIF considerations for maps в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
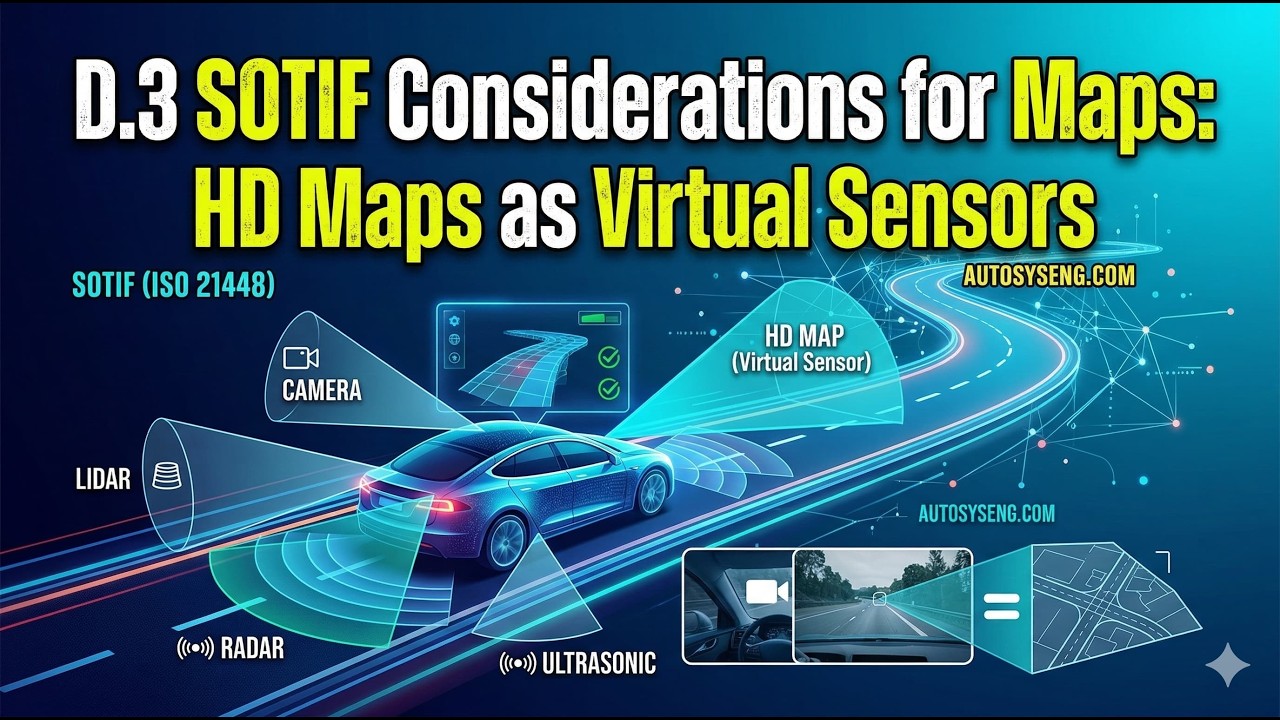
D.3 SOTIF considerations for maps
How does a self-driving car navigate when its high-definition (HD) map is wrong? In this video, we explore the critical role of maps as "virtual sensors" through the lens of SOTIF (Safety of the Intended Functionality - ISO 21448). We dive into the 'stale map problem', how autonomous vehicles use runtime monitoring and crowdsourcing to stay updated, and the logic behind trusting real-time sensor data over static maps. We also cover essential safety concepts like the Operational Design Domain (ODD) and Minimum Risk Maneuvers (MRM) when cars reach the edge of their mapped world. #SOTIF, #ISO21448, #AutonomousDriving, #HDMaps, #ODD, #MinimumRiskManeuver, #MRM, #VirtualSensor, #SensorFusion, #SystemArchitecture, #FunctionalSafety, #ISO26262, #SelfDrivingCars, #AutomotiveEngineering, #DeepTech
Comments






![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)