Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023 скачать в хорошем качестве
Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023
10 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023 в качестве 4k
У нас вы можете посмотреть бесплатно Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Numerikus analízis 6. Spline interpoláció 7. Numerikus differenciálás 2023
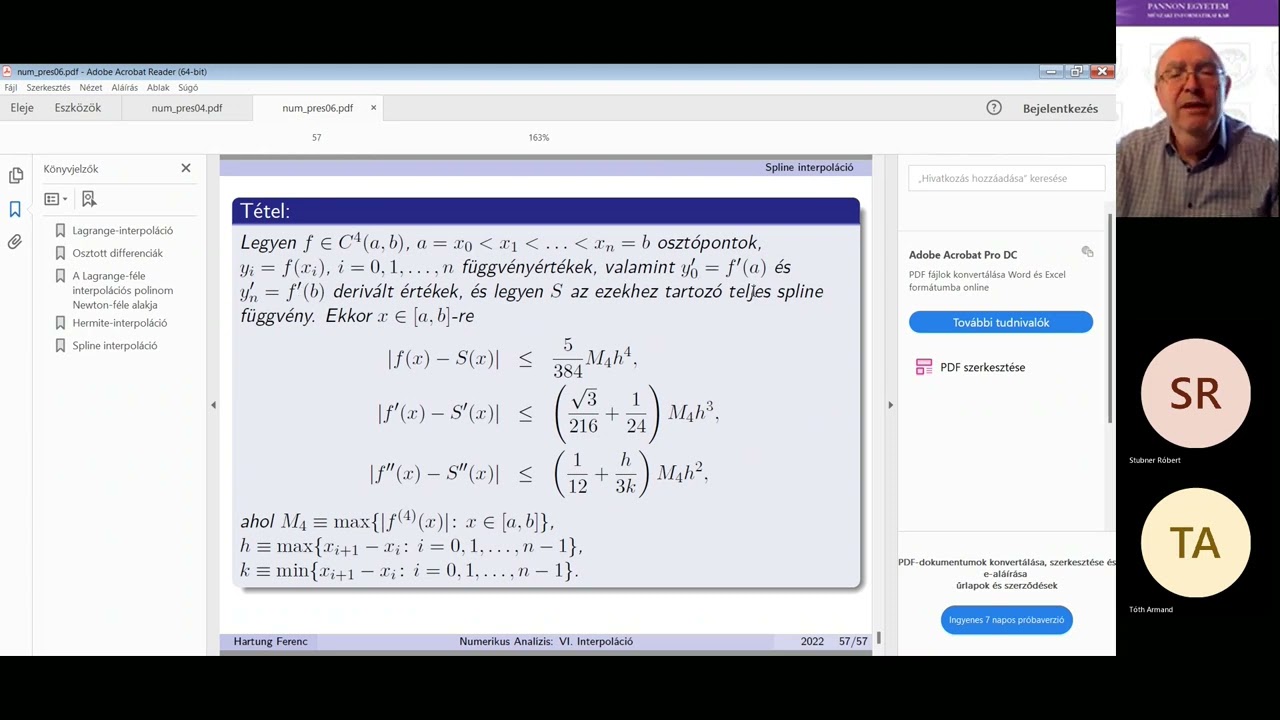
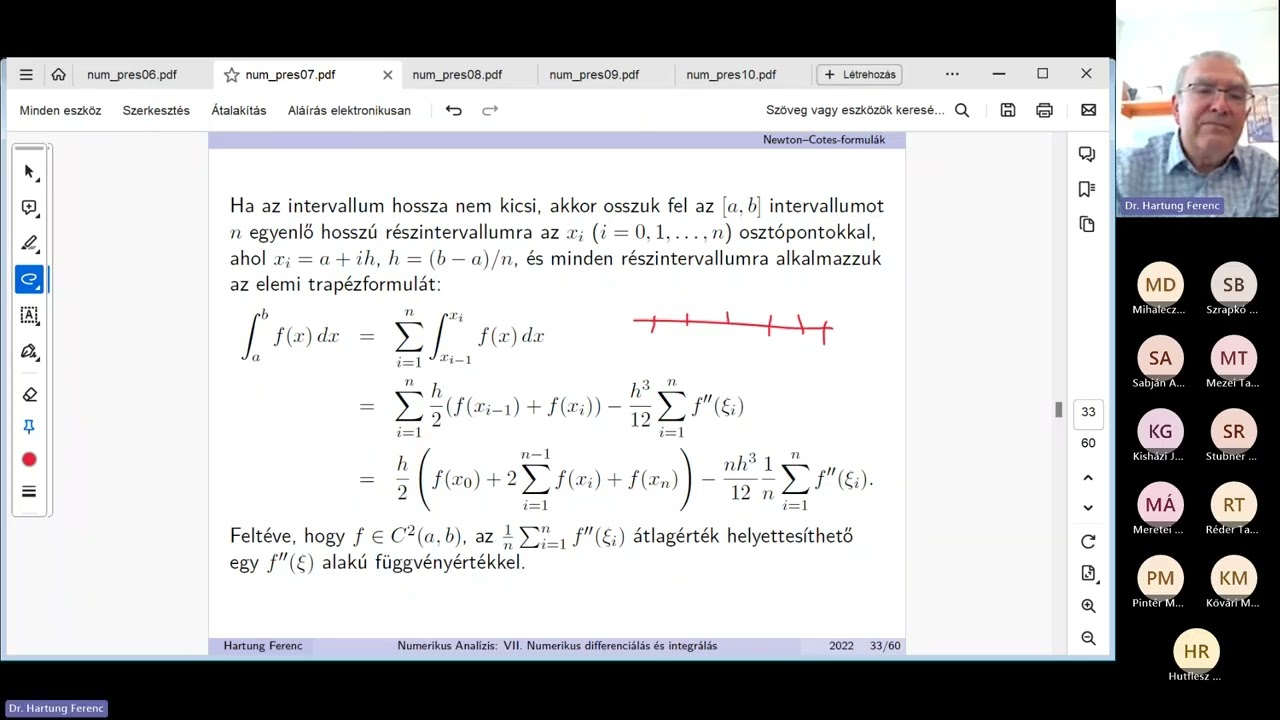
Ez a videó egy egyetemi előadás felvétele a numerikus analízis témakörében, amely a spline interpolációt és a numerikus differenciálást tárgyalja részletesen. Főbb témakörök és összefoglaló 1. Spline interpoláció folytatása [01:08] A harmadrendű (kubikus) spline-ok azért népszerűek, mert a definíciójuk szerint kétszer folytonosan deriválható függvényt eredményeznek, ami vizuálisan is sima görbét ad [01:24]. Példa és alkalmazás: Egy kacsa körvonalán keresztül szemlélteti a különbséget a Lagrange-interpoláció (ami erősen oszcillál) és a spline-interpoláció között (ami pontosan követi a vonalat) [05:03]. Minimális görbület tétele: A természetes harmadrendű spline-nak van a legkisebb görbülete az összes interpoláló függvény közül [07:06]. Hiba becslése: A spline-interpoláció hibája a lépésköz negyedik hatványával (h 4 ) arányos, és nemcsak a függvényértékeket, hanem az első és második deriváltakat is jól közelíti [10:14]. 2. Numerikus differenciálás [14:13] A derivált közelítése a különbségi hányados segítségével történik. A videó két megközelítést mutat be: a Lagrange-módszert [15:38] és a Taylor-módszert [26:32]. Elsőrendű differenciák: Jobb- és baloldali differenciák, ahol a hiba a lépésközzel (h) arányos [21:48]. Másodrendű és magasabb rendű differenciák: Több alappont használatával pontosabb közelítések kaphatók. Centrális differencia: Szimmetrikusan, az adott ponttól balra és jobbra lévő értékeket használja fel, a hiba h 2 -tel arányos [36:54]. Második derivált közelítése: Taylor-sor segítségével vezetnek le egy centrális formulát a második derivált kiszámítására [44:07]. 3. Numerikus instabilitás [48:53] A numerikus deriválás instabil feladat: míg a függvényértékek kis eltérése elhanyagolható lehet, a deriváltak értéke jelentősen megváltozhat [49:06]. A kerekítési hibák hatása kritikus: ha a lépésközt (h) túlságosan kicsire választjuk, a hibatag csökkenése helyett a kerekítési hiba dominálhat és növelheti a végeredmény hibáját [53:15]. 4. Többváltozós függvények és kitekintés [54:08] A parciális deriváltak közelítésére is alkalmazhatóak a korábban bemutatott képletek. Az előadás végén a numerikus integrálás felé veszik az irányt, de ez a következő rész témája lesz a szünet után [54:58].
Comments
-
 10 дней назад
10 дней назад
-
 8 дней назад
8 дней назад
-
 10 дней назад
10 дней назад
-
 5 дней назад
5 дней назад
-
 8 дней назад
8 дней назад
-
 14 часов назад
14 часов назад
-
 8 дней назад
8 дней назад
-
 4 часа назад
4 часа назад
-
 8 дней назад
8 дней назад
-
 8 дней назад
8 дней назад
-
 8 часов назад
8 часов назад
-
 10 дней назад
10 дней назад
-
 5 часов назад
5 часов назад
-
 Трансляция закончилась 7 дней назад
Трансляция закончилась 7 дней назад
-
 8 часов назад
8 часов назад
-
 4 часа назад
4 часа назад
-
 1 день назад
1 день назад
-
 8 дней назад
8 дней назад
-
 10 дней назад
10 дней назад
-
 Трансляция закончилась 1 день назад
Трансляция закончилась 1 день назад