Robotique: Homogeneous Transformations and Kinematic Modeling скачать в хорошем качестве
Robotique: Homogeneous Transformations and Kinematic Modeling
6 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Robotique: Homogeneous Transformations and Kinematic Modeling в качестве 4k
У нас вы можете посмотреть бесплатно Robotique: Homogeneous Transformations and Kinematic Modeling или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Robotique: Homogeneous Transformations and Kinematic Modeling в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Robotique: Homogeneous Transformations and Kinematic Modeling
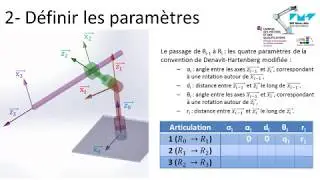
Ces documents présentent des exercices de *robotique* portant sur la *modélisation géométrique* des manipulateurs à travers l'utilisation de *matrices de transformation homogène**. Les premières pages détaillent les calculs de **rotation* et de *translation* nécessaires pour effectuer des changements de repères dans un espace tridimensionnel. La suite de l'étude se concentre sur l'application de la méthode de *Denavit-Hartenberg**, permettant de définir les paramètres structurels d'un bras articulé. À l'aide de tableaux de données techniques, l'auteur établit les équations du **modèle géométrique direct* afin de localiser précisément l'organe terminal du robot. L'ensemble constitue un support pédagogique illustrant la transition mathématique entre les *variables articulaires* et la position cartésienne d'un système mécanique.
Comments



![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)