Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger) скачать в хорошем качестве
Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger)
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger) в качестве 4k
У нас вы можете посмотреть бесплатно Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger)
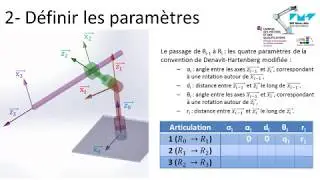
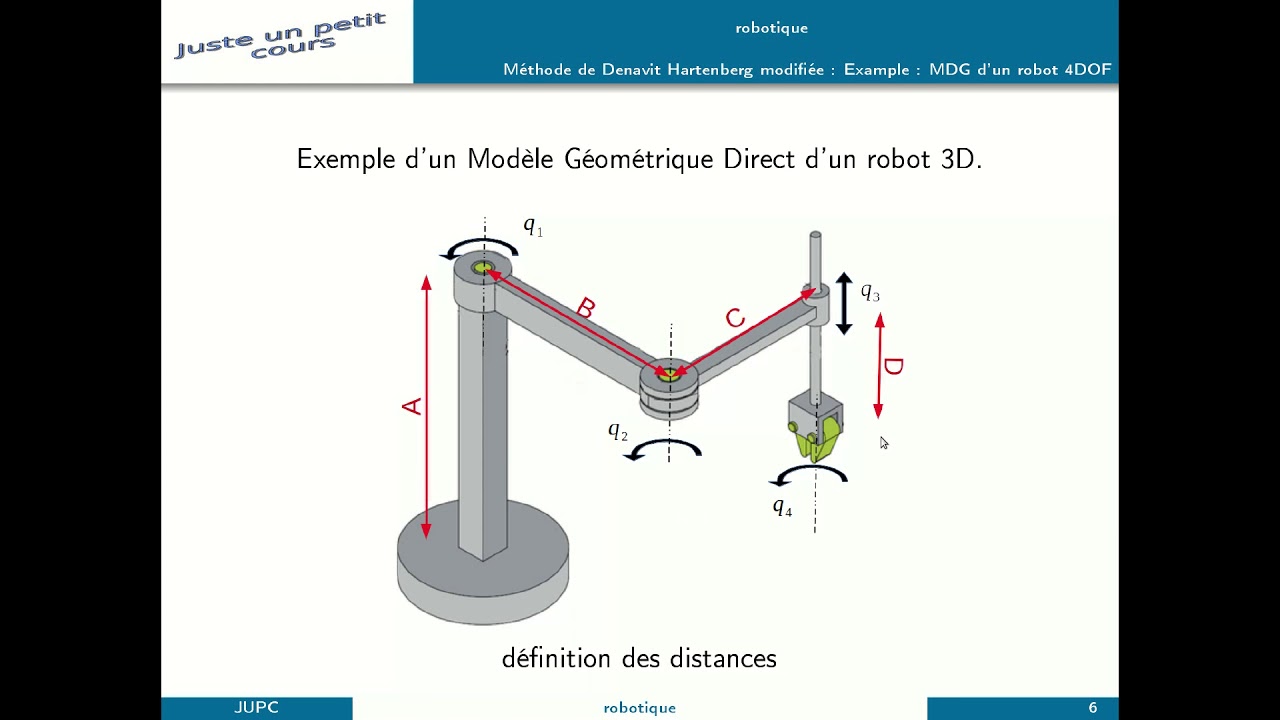
Cette vidéo présente la méthode de Denavit Hartenberg modifiée (Khalil Kleinfinger) pour le placement des axes et le modèle géométrique direct d'un robot manipulateur. Attention, ce n''est pas la méthode "historique" qui est présentée : • Méthode de Denavit Hartenberg
Comments