Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types скачать в хорошем качестве
Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types в качестве 4k
У нас вы можете посмотреть бесплатно Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
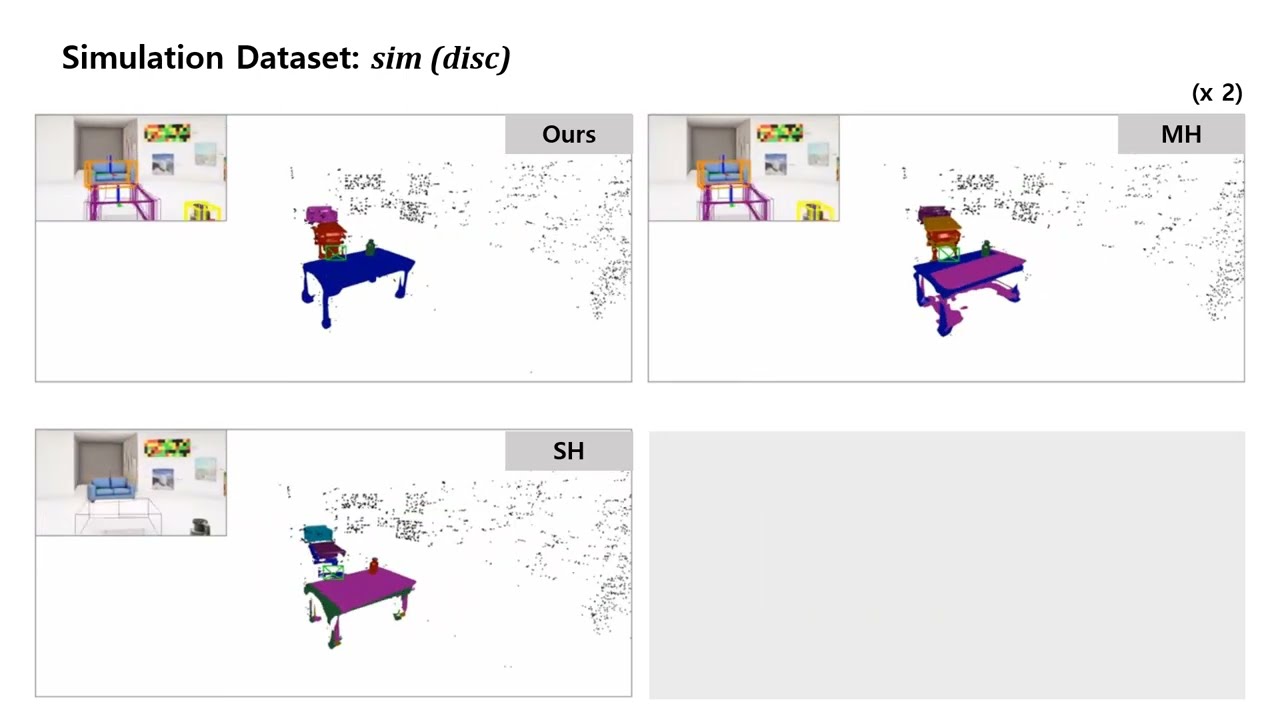
Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types
Status: accepted for publication in IEEE International Conference on Robotics and Automation (ICRA) 2023 Category : Object-based SLAM, symmetry, pose ambiguity Author : Taekbeom Lee*, Youngseok Jang*, H. Jin Kim (* Equal contribution) Abstract: Existence of symmetric objects, whose observation at different viewpoints can be identical, can deteriorate the performance of simultaneous localization and mapping (SLAM). This work proposes a system for robustly optimizing the pose of cameras and objects even in the presence of symmetric objects. We classify objects into three categories depending on their symmetry characteristics, which is efficient and effective in that it allows to deal with general objects and the objects in the same category can be associated with the same type of ambiguity. Then we extract only the unambiguous parameters corresponding to each category and use them in data association and joint optimization of the camera and object pose. The proposed approach provides significant robustness to the SLAM performance by removing the ambiguous parameters and utilizing as much useful geometric information as possible. Comparison with baseline algorithms confirms the superior performance of the proposed system in terms of object tracking and pose estimation, even in challenging scenarios where the baseline fails. Contact : {ltb1128, duscjs59}@snu.ac.kr
Comments



![[RA-L] Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization](https://imager.clipsaver.ru/FkY7t2IeWhE/max.jpg)

![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)







![[CVPR 2017] Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning](https://imager.clipsaver.ru/q8HU_bK8LOk/max.jpg)

