Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF скачать в хорошем качестве
Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF
10 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF в качестве 4k
У нас вы можете посмотреть бесплатно Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
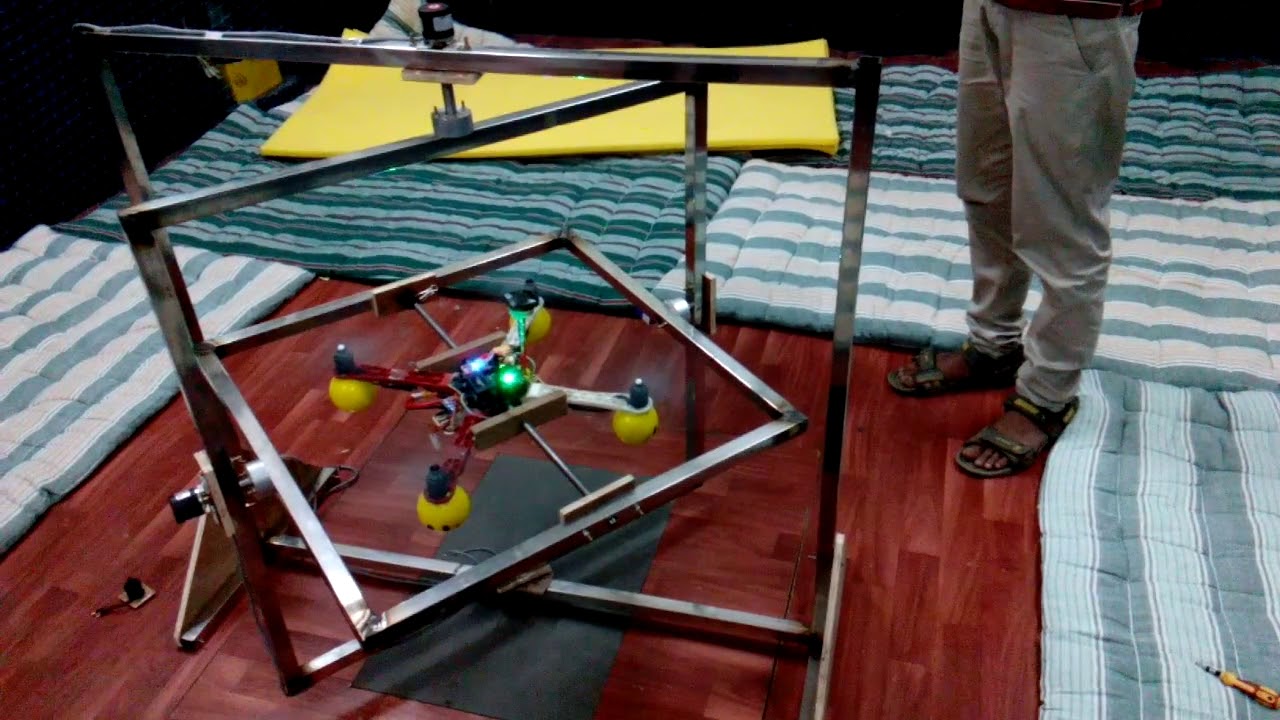
Ground Fixed Quadrotor Flight Control Test Bench for UAVs w/ Variable DOF
Dr. Ahmet KIRLI, M.Sc.. Dissertation Advisor: Assoc. Prof. Dr. V. Emre Ömürlü Prof. Dr. Ata Mugan Unmanned air vehicles (UAV) and especially quadrotors have drawn great attention in recent years because of their maneuverability, ease of design and control. Most of the works concentrate mostly on control; yet, design and communication are also some sub-topics. In this research, a stationary, four rotor air vehicle with limited/controlled degree of freedom is constructed so that various control algorithms and their changing effects with varying vehicle dynamics can be studied on the ground for safety purposes. Ascending/descending, pitch/yaw/roll motions can be limited/controlled by setting the vehicle’s degree of freedom mechanically, resulting better net observability of the control algorithms on the vehicle’s dynamic performance. Design, in terms of mechanics, mechatronics and software is presented and the usability of the system is shown. Parallel self-tuning fuzzy PD + PD control is applied to the system for preliminary studies and results are discussed. Despite of the present sensor noise, satisfactory pitch/roll/yaw control is achieved.
Comments