Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot скачать в хорошем качестве
Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot
5 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot в качестве 4k
У нас вы можете посмотреть бесплатно Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot
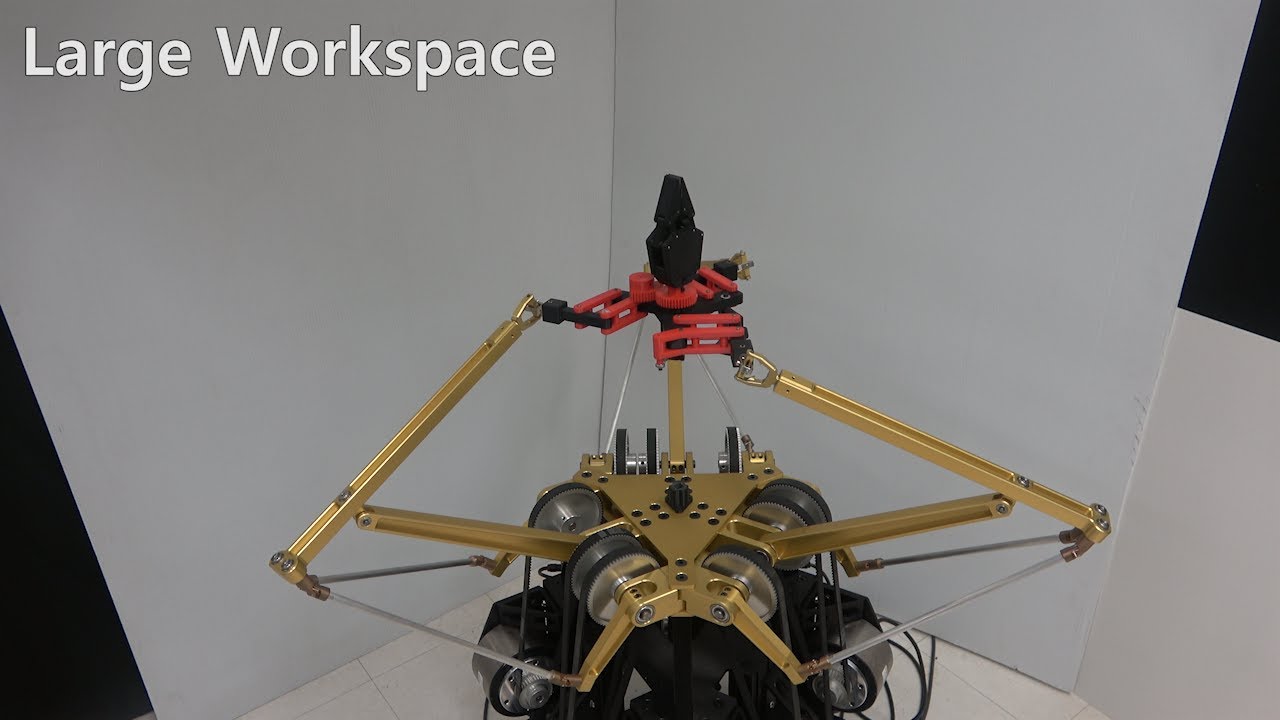
This video presents a kinematically redundant 9-DoF parallel robot designed for low-impedance, sensorless physical human-robot interaction. All actuators are located on the base of the robot, resulting in low moving mass and reduced inertia at the end-effector. The robot relies on backdrivable direct-drive motors for proprioceptive actuation, enabling intuitive, low-impedance, and high-bandwidth physical interaction without the need for force or torque sensors. This architecture is well suited for safe and responsive human-robot interaction tasks. Arda Yigit, Simon Foucault, Thierry Laliberté, David Breton, Zhou Zhou, Clément Gosselin Control Engineering Practice, Volume 169, April 2026 https://doi.org/10.1016/j.conengprac.... #HumanRobotCollaboration #ParallelRobots #RoboticsResearch
Comments








![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)