Cours de Robotique : séance 4 sur 9 скачать в хорошем качестве
Cours de Robotique : séance 4 sur 9
Трансляция закончилась 9 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Cours de Robotique : séance 4 sur 9 в качестве 4k
У нас вы можете посмотреть бесплатно Cours de Robotique : séance 4 sur 9 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Cours de Robotique : séance 4 sur 9 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Cours de Robotique : séance 4 sur 9
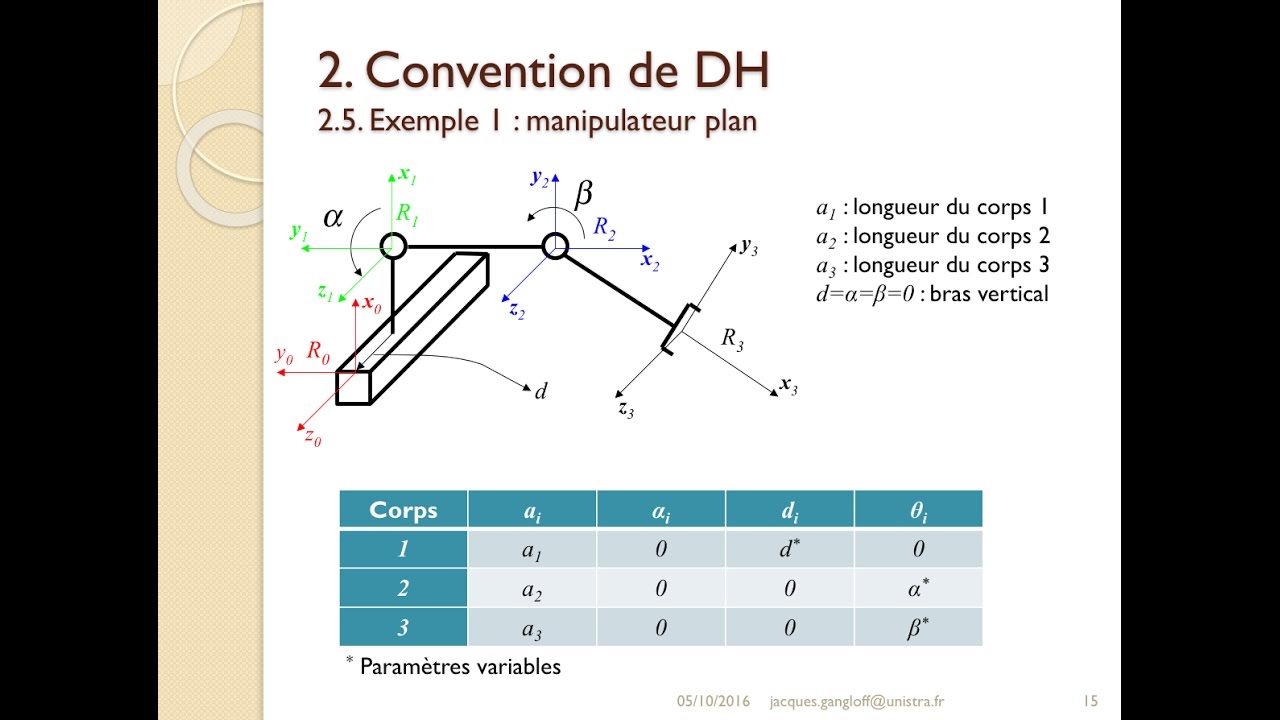
Modélisation géométrique, paramètres de Denavit-Hartenberg. Cours de robotique de manipulation de Télécom Physique Strasbourg / master IRIV Niveau : bac+5 Matériel pédagogique sur https://www.rbotx.org menu "Programme"
Comments
-
Трансляция закончилась 9 лет назад
-
4 года назад
-
19 часов назад
-
1 день назад
-
3 недели назад
-
6 лет назад
-
18 часов назад
-
Трансляция закончилась 9 лет назад
-
2 года назад
-
2 дня назад
-
2 месяца назад
-
4 года назад
-
2 года назад
-
3 года назад
-
5 лет назад
-
8 лет назад
-
4 месяца назад
-
5 лет назад
-
3 года назад
-
8 лет назад