AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms скачать в хорошем качестве
AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms в качестве 4k
У нас вы можете посмотреть бесплатно AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms
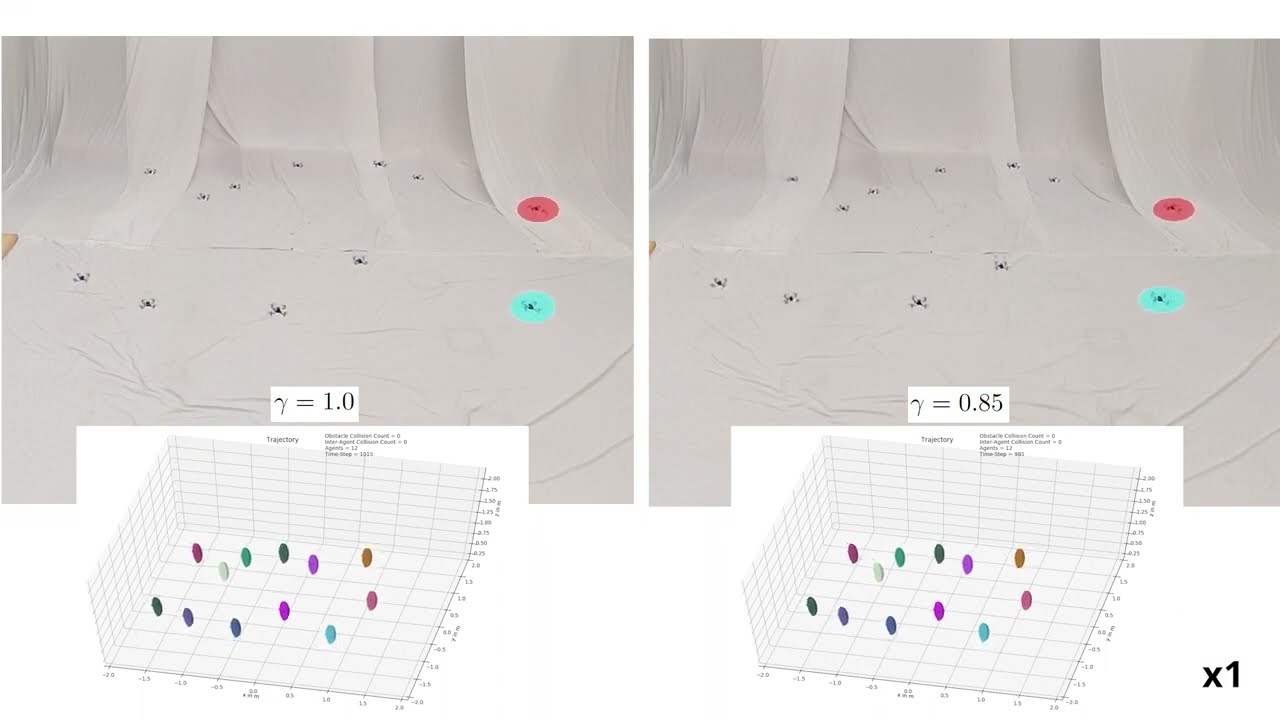
ICRA 2023 Video Title: AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms in Cluttered Environments Researchers: Vivek K. Adajania, Siqi Zhou, Arun Kumar Singh, and Angela P. Schoellig Overview: This paper presents a scalable online algorithm to generate safe and kinematically feasible trajectories for quadrotor swarms. Existing approaches rely on linearizing Euclidean distance-based collision constraints and on axis-wise decoupling of kinematic constraints to reduce the trajectory optimization problem for each quadrotor to a quadratic program (QP). This conservative approximation often fails to find a solution in cluttered environments. We present a novel alternative that handles collision constraints without linearization and kinematic constraints in their quadratic form while still retaining the QP form. We achieve this by reformulating the constraints in a polar form and applying an Alternating Minimization algorithm to the resulting problem. Through extensive simulation results, we demonstrate that, as compared to Sequential Convex Programming (SCP) baselines, our approach achieves on average a 72% improvement in success rate, a 36% reduction in mission time, and a 42 times faster per-agent computation time. We also show that collision constraints derived from discrete-time barrier functions (BF) can be incorporated, leading to different safety behaviours without significant computational overhead. Moreover, our optimizer outperforms the state-of-the-art optimal control solver ACADO in handling BF constraints with a 31 times faster per-agent computation time and a 44% reduction in mission time on average. We experimentally validated our approach on a Crazyflie quadrotor swarm of up to 12 quadrotors. Code Repository: https://github.com/utiasDSL/AMSwarm Paper: https://arxiv.org/abs/2303.04856
Comments