Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio скачать в хорошем качестве
Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio в качестве 4k
У нас вы можете посмотреть бесплатно Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Virtual Commissioning con SIMIT, PLCsim Adv y Robot Studio
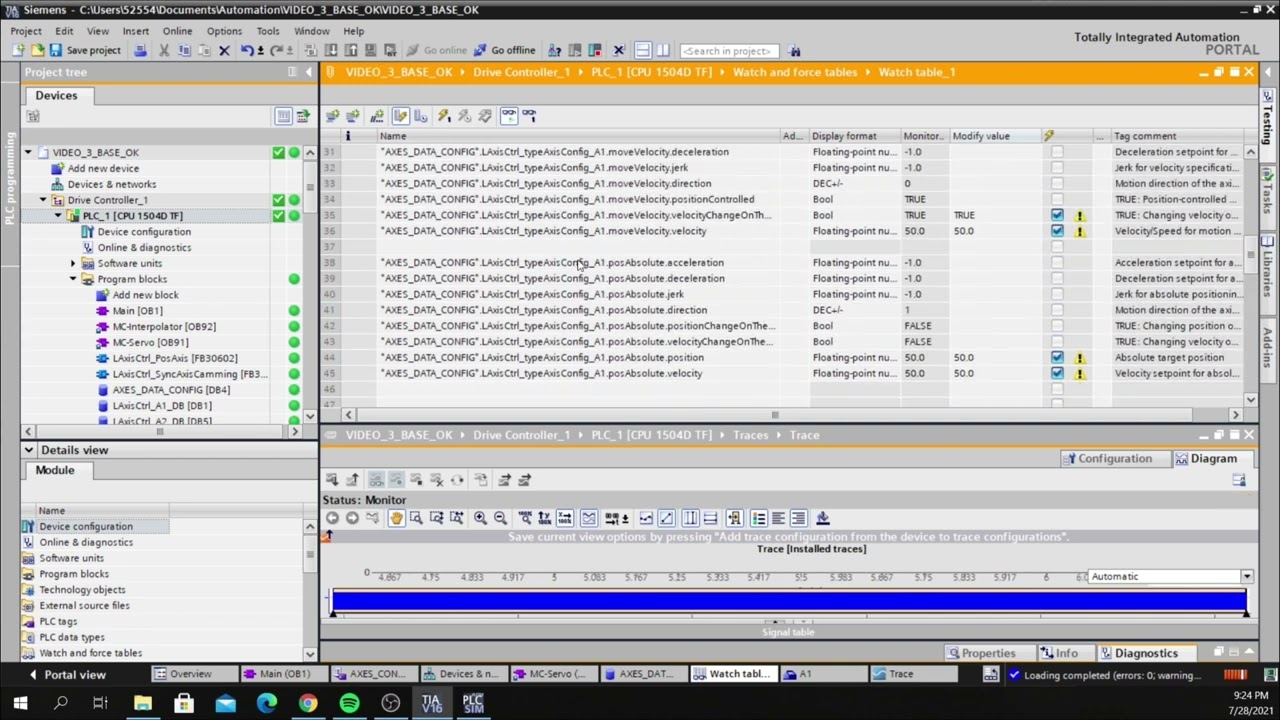
Ejemplo de Virtual Commissioning para un Pick&Place con Robot y PLC, realizado en el Centro Integrado de Formación Profesional Salesianos Deusto (Bilbao): Los elementos reales de la aplicación son: Robot Colaborativo de Yumi IRB14050 (ABB) Smart Gripper con Ventosa de Vacío Controlador Omnicore con dos detectores (Capacitivo y Foto-Eléctrico) conectados a sus entradas y 3 Led de señalización a sus salidas. PLC S7-1512C con botonera (emergencia) y señalización conectada a sus I/O. La conectividad Maestro-Esclavo se realiza mediante PROFINET. Para la elaboración de Virtual Comissioning se emplean: Robot Studio con Componentes Inteligentes SIMIT PLCSim Advanced FASES del Virtual Commissioning Fase 1 (Robot Studio-SIMIT): Se realiza una estación virtualizada (3D) en Robot Studio del entorno Real. Se añade el robot basado en su Backup real. Se acoplan y configuran los componentes inteligentes necesarios. Se realiza la programación RAPID y las pruebas con sus I/O de profinet simuladas. Se crea la conexión de todas las variables I/O de Profinet mediante Shared Memory y se prueba en un Chart (RS) que posteriormente se desactiva. Fase 2 (TIA Portal – PLCSim Adv - SIMIT): Se realiza un proyecto basado en el HW real (PLC y Robot) , realizando su programación (TIA) y probándola mediante el PLCsim Advanced. Se crea la conexión de las variables I/O de Profinet mediante el coupling PLCSIM Advanced y se prueba en un Chart (S7) que posteriormente se desactiva. Fase 3 (PLCSim Adv – SIMIT – Shared Memory): Se realiza y se prueba la conexión entre las señales de PLC (PLCSim Advanced) y las del Robot Studio (Shared Memory) mediante un Chart (S7_RS). Se completa la virtualización con una botonera (chart) basada en la botonera real, totalmente operativa. Fase 4 (Aplicación real): Tras las pruebas y ajustes necesarios de programación (TIA/RAPID) y validar la aplicación se cargan los programas en la estación real. Se ajusta la pequeña desviación de las 2 posiciones de Pick & Place y se comprueba el funcionamiento paso a paso para su posterior funcionamiento en automático, con un tiempo de puesta en marcha en el puesto físico extremadamente reducido. Ciclo de Grado Superior en Automatización y Robótica Industrial en Salesianos Deusto (Bilbao). Info gehiago: https://tknika.eus/ https://www.salesianosdeusto.com/ofer... https://new.siemens.com/es/es/product... https://new.abb.com/products/robotics... Music: https://freemusicarchive.org/
Comments

















![1. CS50 на русском: Лекция #1 [Гарвард, Основы программирования, осень 2015 год]](https://imager.clipsaver.ru/SW_UCzFO7X0/max.jpg)