ICAPS 2020 Best Dissertation Award Talk - Kyle Wray скачать в хорошем качестве
ICAPS 2020 Best Dissertation Award Talk - Kyle Wray
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ICAPS 2020 Best Dissertation Award Talk - Kyle Wray в качестве 4k
У нас вы можете посмотреть бесплатно ICAPS 2020 Best Dissertation Award Talk - Kyle Wray или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ICAPS 2020 Best Dissertation Award Talk - Kyle Wray в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
ICAPS 2020 Best Dissertation Award Talk - Kyle Wray
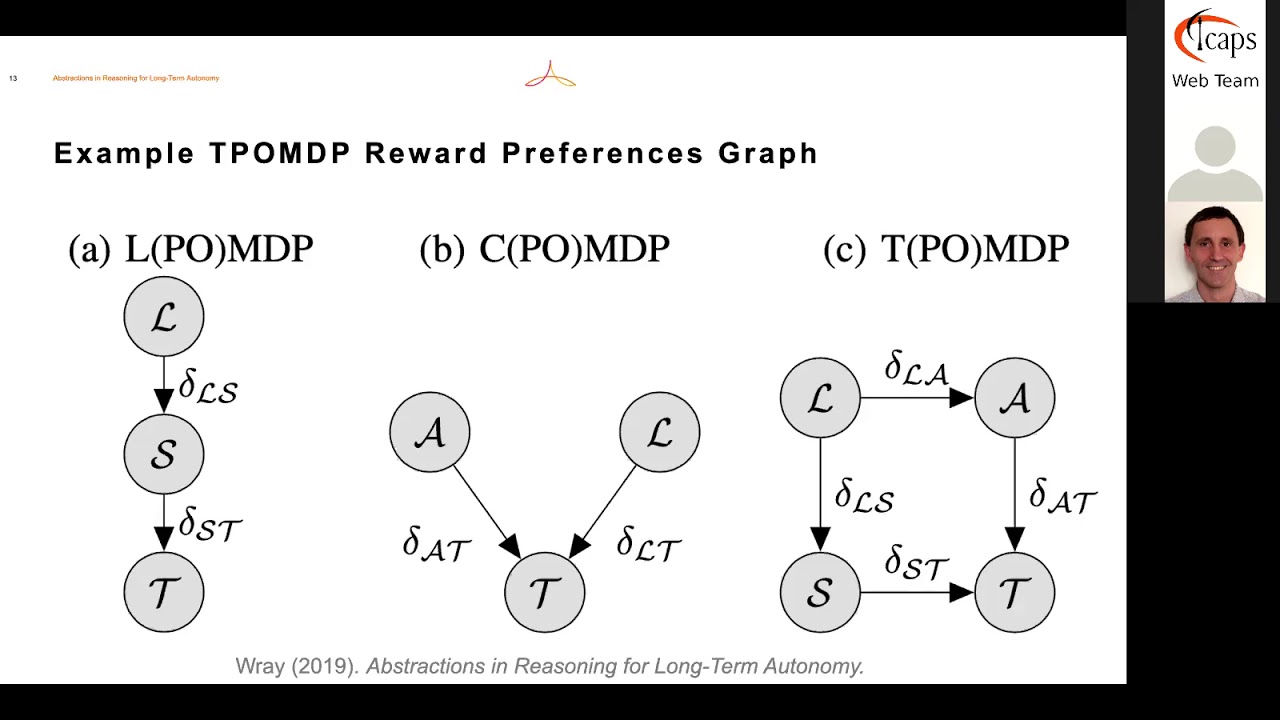
Thesis Topic: Abstractions in Reasoning for Long-Term Autonomy The dissertation is a well-rounded enterprise for designing and deploying control solutions for autonomous vehicles based on decision theoretic planning. It shows how to develop and successfully deploy such solutions, and presents novel contributions in different areas: hierarchical MDP/POMDP planning, design of controllers, multi-objective decision making, semi-autonomous systems, and scalable online decision making. For hierarchical planning, the thesis introduces policy networks that permit a unified and clear integration of subproblems and their solutions, resolving the problem of transferring control between subproblems. In design of controllers, the belief-infused finite-state controller for POMDPs are introduced. In multi-objective decision making problems, the thesis develops the topological MDP model together with scalable algorithms. In the semi-autonomous setting (SAS), the dissertation proposes a model for semi-autonomous that is used to decide when help from the human is required together with analyses of its properties in terms of safety and operation. Finally, in scalable online decision making, the dissertation presents a technique called MODIA that permits an effective solution for the so-called intersection problem for autonomous vehicles which presents itself when the vehicle arrives at an intersection where other uncontrollable entities are found.
Comments






![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)











![Как происходит модернизация остаточных соединений [mHC]](https://imager.clipsaver.ru/jYn_1PpRzxI/max.jpg)
