Lecture 4 - Description of position and orientation скачать в хорошем качестве
Lecture 4 - Description of position and orientation
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Lecture 4 - Description of position and orientation в качестве 4k
У нас вы можете посмотреть бесплатно Lecture 4 - Description of position and orientation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Lecture 4 - Description of position and orientation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
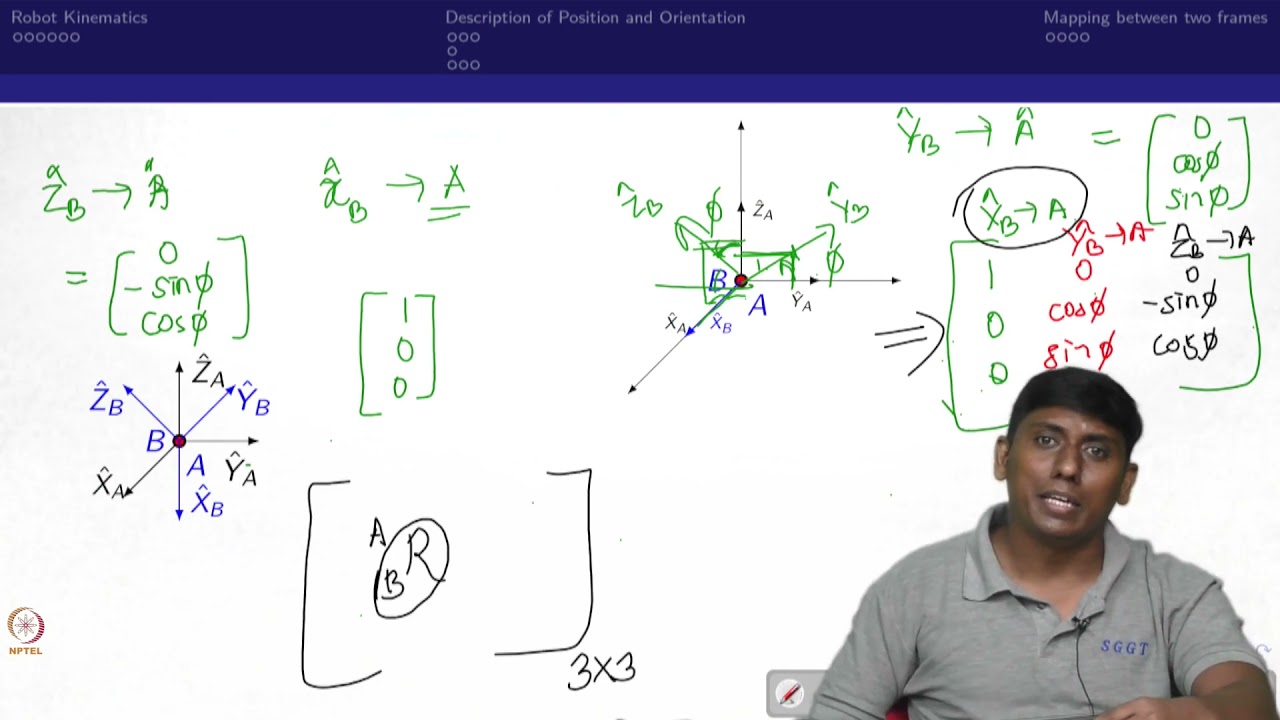
Lecture 4 - Description of position and orientation
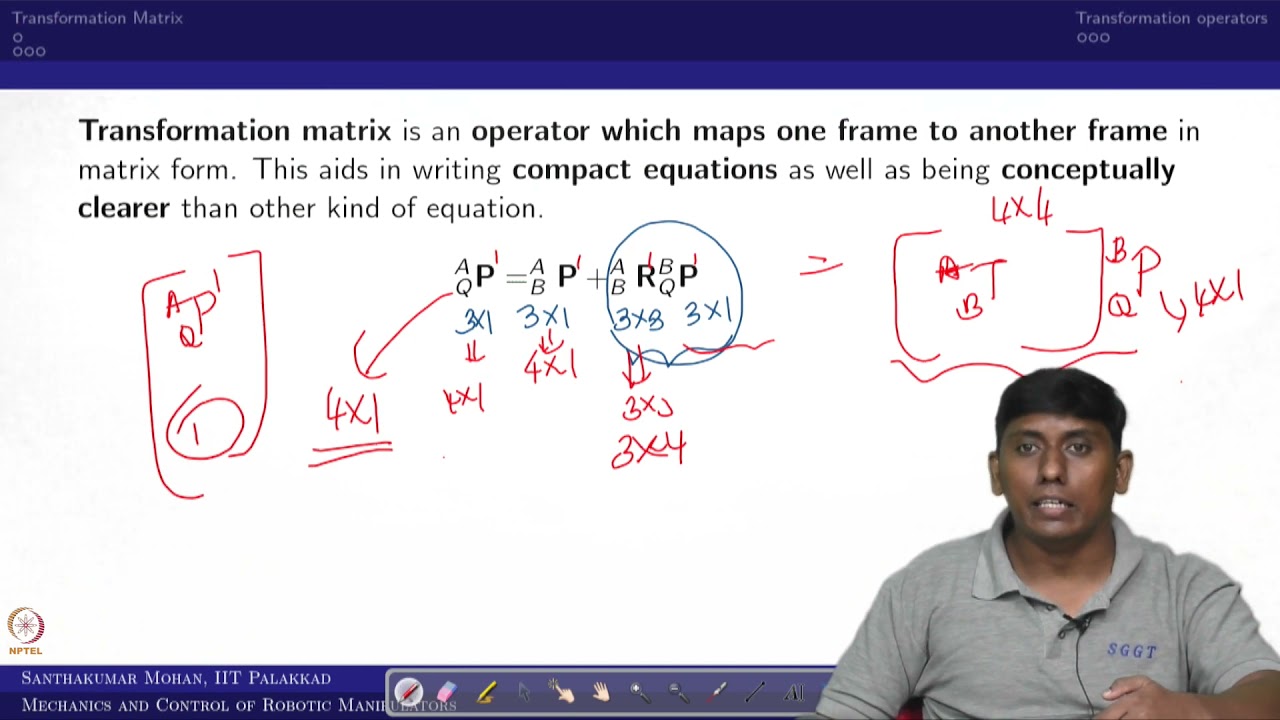
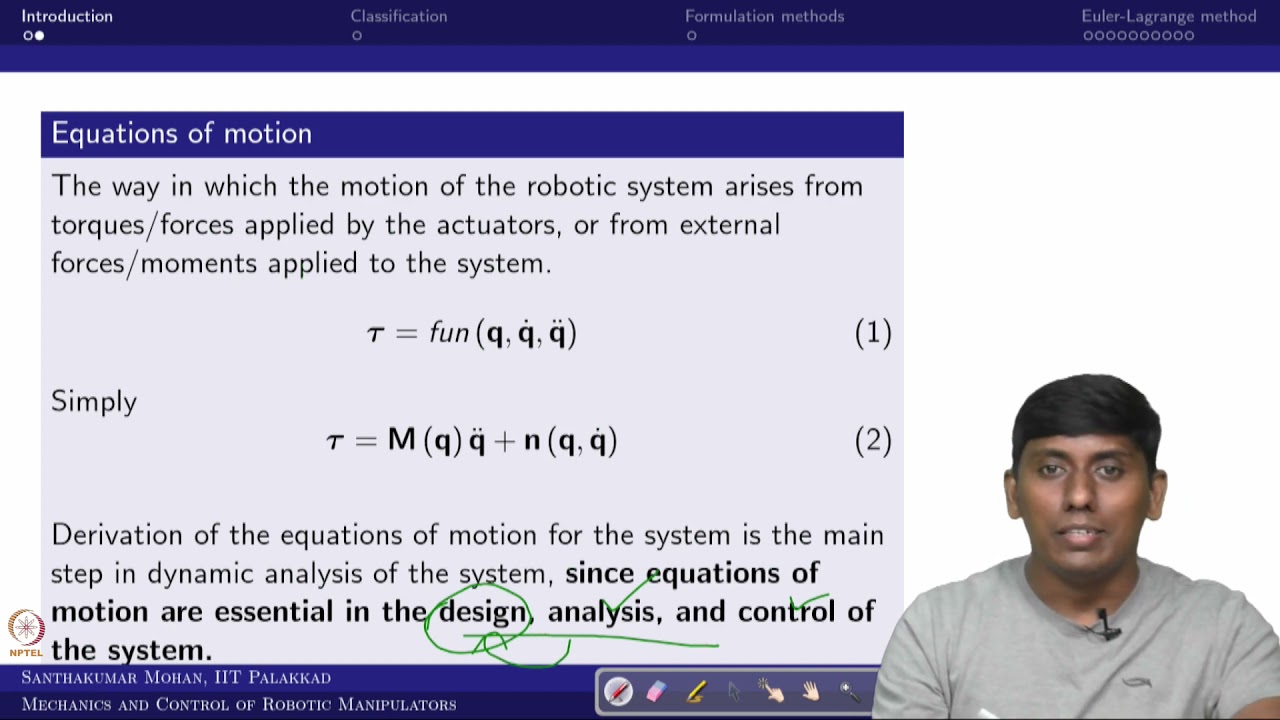
Description of position and orientation Prof. Santhakumar Mohan Associate Professor Mechanical Engineering IIT Palakkad Description of position and orientation, position vector and rotation matrix. Mapping between two frames.
Comments