Sparse Iterative Closest Point скачать в хорошем качестве
Sparse Iterative Closest Point
12 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Sparse Iterative Closest Point в качестве 4k
У нас вы можете посмотреть бесплатно Sparse Iterative Closest Point или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Sparse Iterative Closest Point в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Sparse Iterative Closest Point
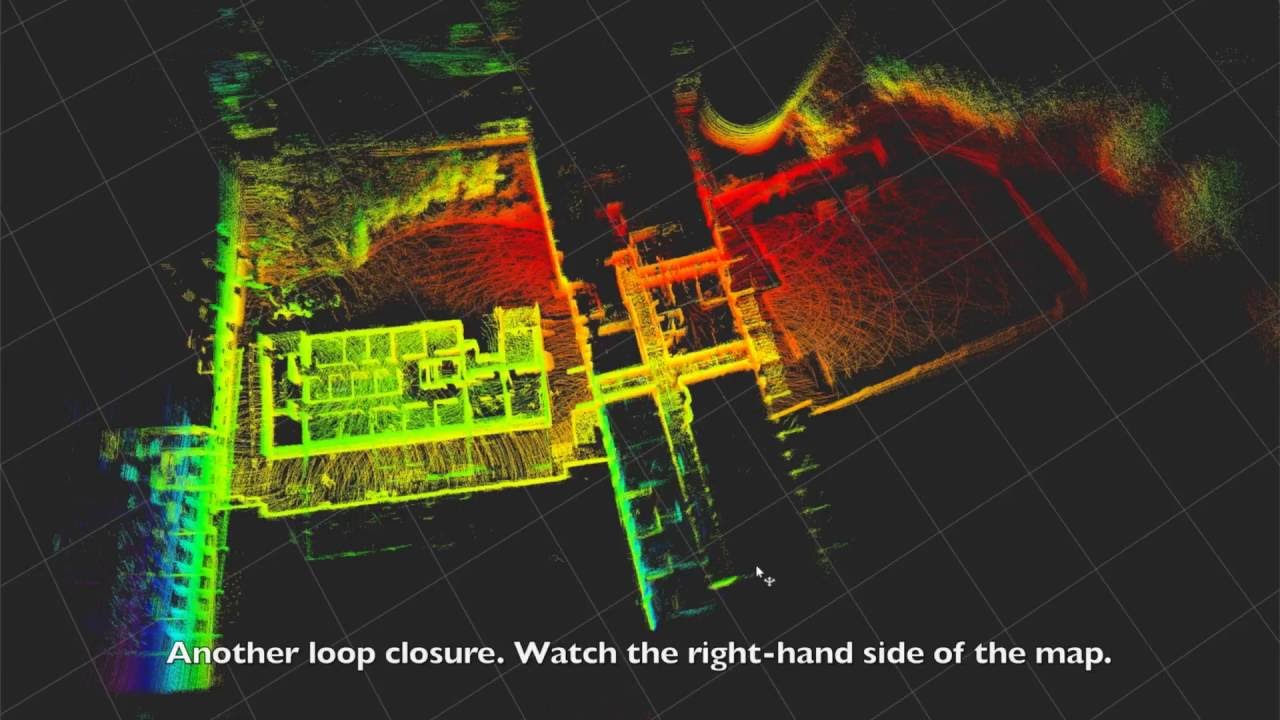
Sofien Bouaziz, Andrea Tagliasacchi, Mark Pauly Symposium on Geometry Processing 2013 Abstract: Rigid registration of two geometric data sets is essential in many applications, including robot navigation, surface reconstruction, and shape matching. Most commonly, variants of the Iterative Closest Point (ICP) algorithm are employed for this task. These methods alternate between closest point computations to establish correspondences between two data sets, and solving for the optimal transformation that brings these correspondences into alignment. A major difficulty for this approach is the sensitivity to outliers and missing data often observed in 3D scans. Most practical implementations of the ICP algorithm address this issue with a number of heuristics to prune or re-weight correspondences. However, these heuristics can be unreliable and difficult to tune, which often requires substantial manual assistance. We propose a new formulation of the ICP algorithm that avoids these difficulties by formulating the registration optimization using sparsity inducing norms. Our new algorithm retains the simple structure of the ICP algorithm, while achieving superior registration results when dealing with outliers and incomplete data. http://lgg.epfl.ch/publications.php
Comments
















![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)