Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization скачать в хорошем качестве
Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization
3 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization в качестве 4k
У нас вы можете посмотреть бесплатно Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization
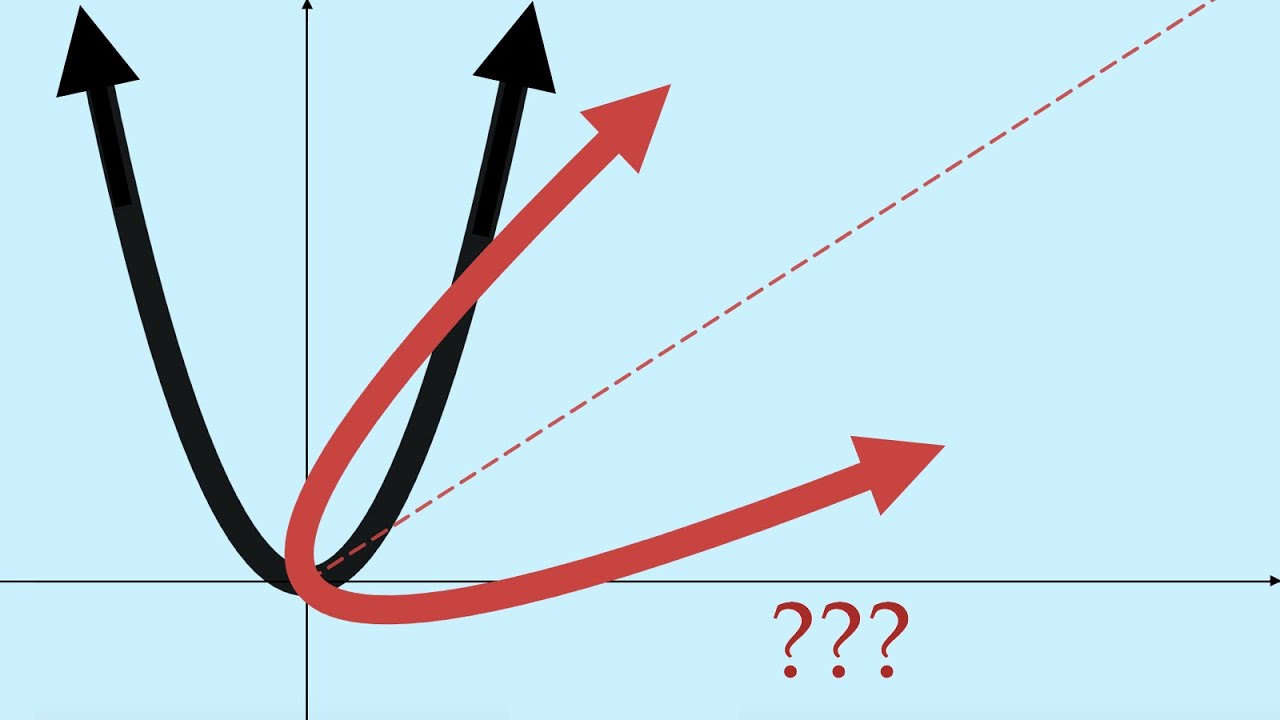
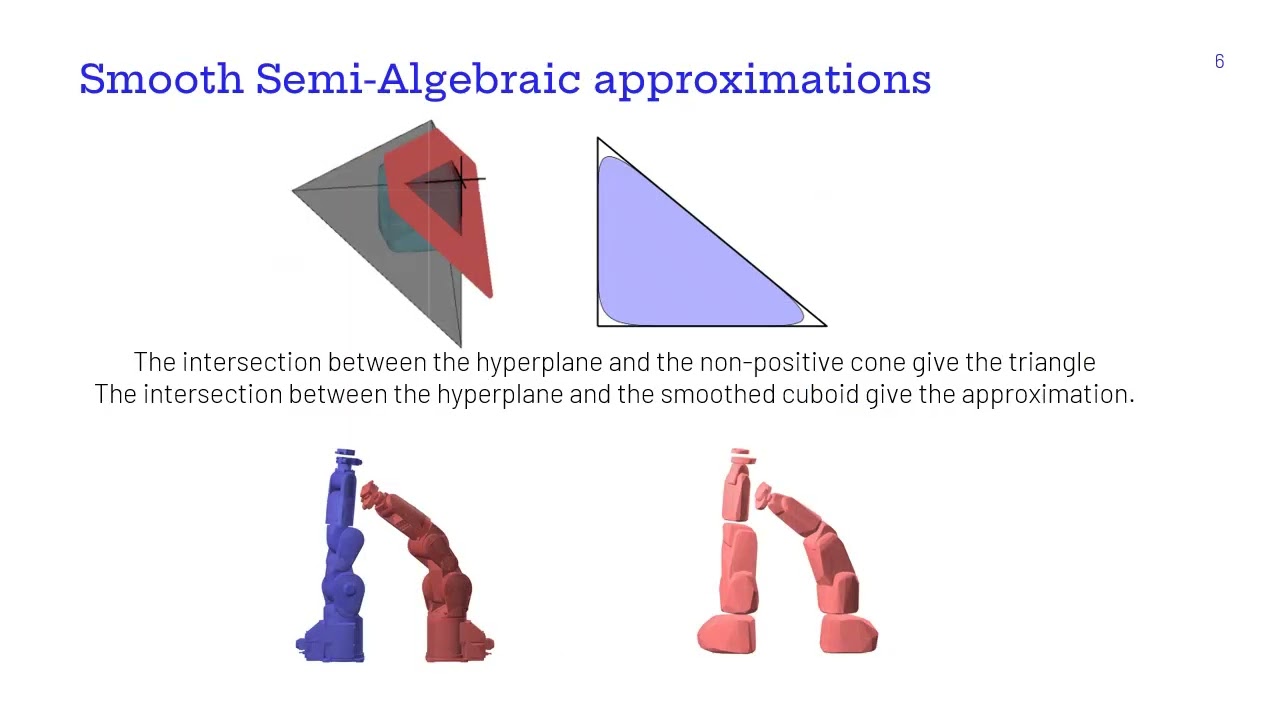
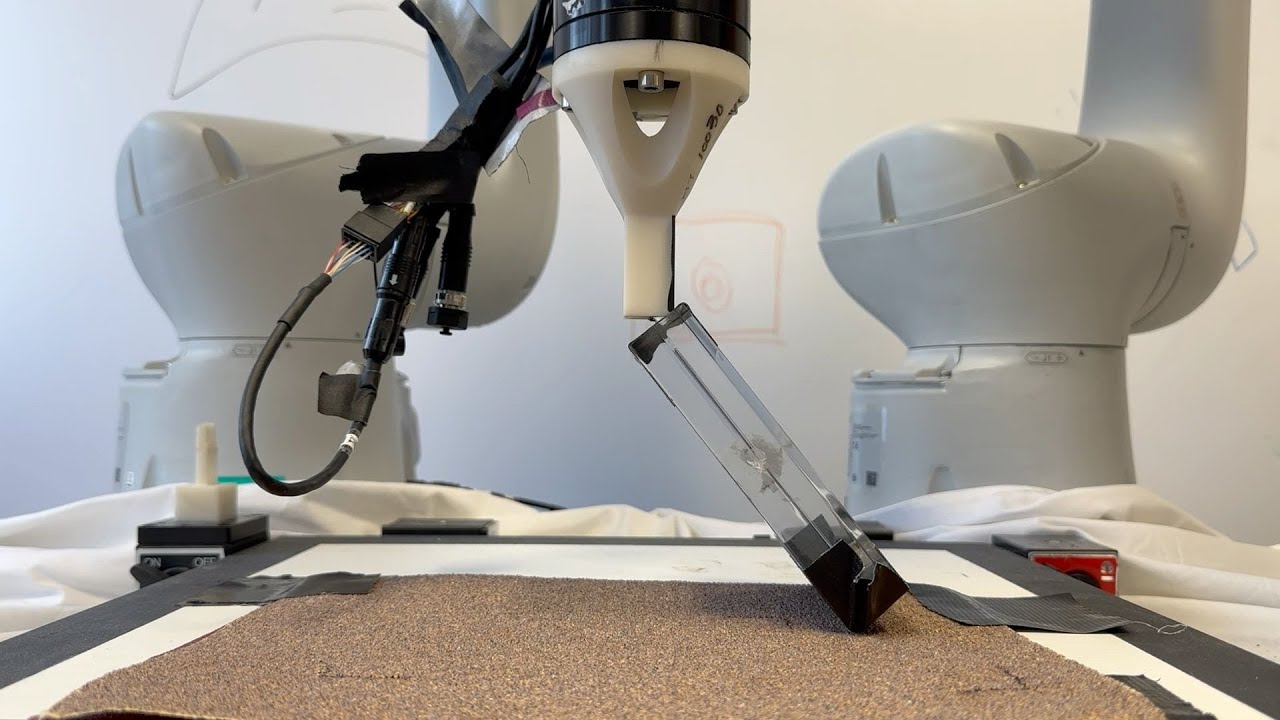
This is the supplementary video for our paper describing Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization which was accepted for presentation at IROS 2025. Optimization-based methods are widely used for computing fast, diverse solutions for complex tasks such as collision-free movement or planning in the presence of contacts. However, most of these methods require enforcing non-penetration constraints between objects, resulting in a non-trivial and computationally expensive problem. This makes the use of optimization-based methods for planning and control challenging. In this paper, we present a method to efficiently enforce non-penetration of sets while performing optimization over their configuration, which is directly applicable to problems like collision-aware trajectory optimization. We introduce novel differentiable conditions with analytic expressions to achieve this. To enforce non-collision between non-smooth bodies using these conditions, we introduce a method to approximate polytopes as smooth semi-algebraic sets. We present several numerical experiments to demonstrate the performance of the proposed method and compare the performance with other baseline methods recently proposed in the literature.
Comments
![Как происходит модернизация остаточных соединений [mHC]](https://imager.clipsaver.ru/jYn_1PpRzxI/max.jpg)




![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)
![[ICRA25] Proactive Assistance in Human-Robot Collaboration through Task Progress Estimation](https://imager.clipsaver.ru/UyIJPxoL_KQ/max.jpg)
![[MERL Seminar Series Summer 2025] Robust Trajectory Planning and Control](https://imager.clipsaver.ru/57TpWAbC4zU/max.jpg)