From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds скачать в хорошем качестве
From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds
6 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds в качестве 4k
У нас вы можете посмотреть бесплатно From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
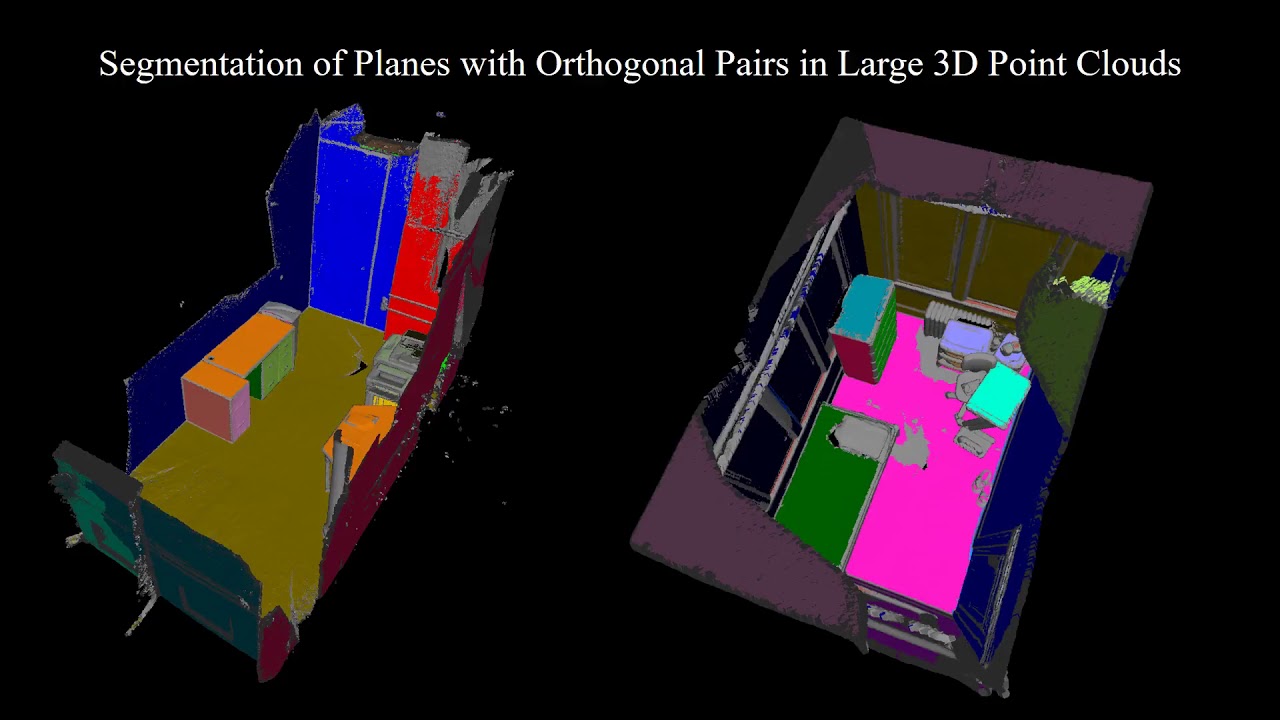
From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds
Complimentary video for our RA-Letters 2020 paper focusing on detecting and refining orthogonal planes in point clouds. For source code: https://github.com/c-sommer/orthogona... Here is the abstract: We propose a new method for segmentation-free joint estimation of orthogonal planes, their intersection lines, relationship graph and corners lying at the intersection of three orthogonal planes. Such unified scene exploration under orthogonality allows for multitudes of applications such as semantic plane detection or local and global scan alignment, which in turn can aid robot localization or grasping tasks. Our two-stage pipeline involves a rough yet joint estimation of orthogonal planes followed by a subsequent joint refinement of plane parameters respecting their orthogonality relations. We form a graph of these primitives paving the way to the extraction of further reliable features: lines and corners. Our experiments demonstrate the validity of our approach in numerous scenarios from wall detection to 6D tracking, both on synthetic and real data.
Comments
















![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)