Hexapod Robot on Random Stepfield скачать в хорошем качестве
Hexapod Robot on Random Stepfield
13 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Hexapod Robot on Random Stepfield в качестве 4k
У нас вы можете посмотреть бесплатно Hexapod Robot on Random Stepfield или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Hexapod Robot on Random Stepfield в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
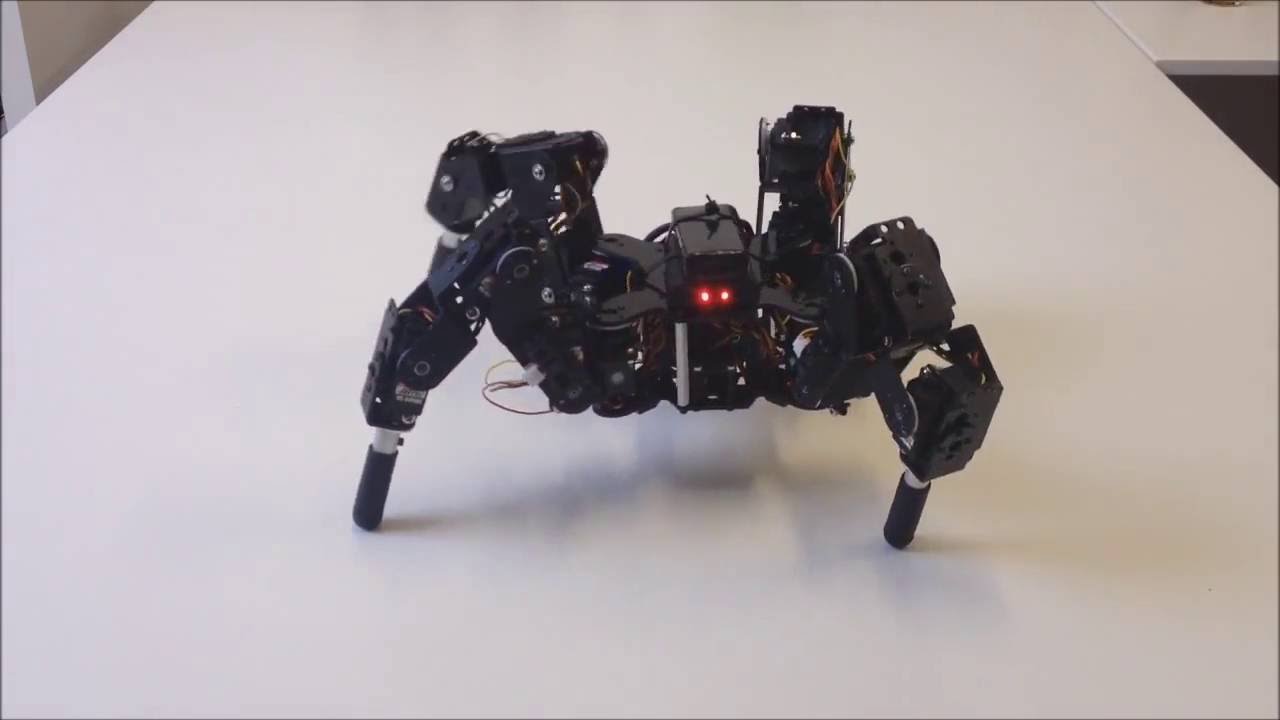
Hexapod Robot on Random Stepfield
This hexapod robot uses a clever force feedback system to detect how much force is being applied to the ground. Notice how the leg lengthens in search of lower terrain and remains short when walking on high terrain. The stepfield is completely random. The robot has 4 actuators per leg (whoa!!) and uses an alternating tripod gait. The servos are dynamixel and the controllers are three Robotis CM-700s. Although an inclinometer is used for data purposes, the control system does not utilize the inertia state information, and the legs do not share information about their state. The algorithm was built this way in order to mimic what may be going on in legged animal at high speeds. There simply is not enough time for a central controller to receive information from each muscle system, make a decision and then route that decision back to the muscles before the next step must be taken. When moving at that speed, legs must be "smart" enough to handle even very complex terrain relying only on local leg feedback mechanisms. This is the principle behind the Force Threshold-based Position (FTP) controller on display here. This work is being done at the University of South Florida by Dr. Luther Palmer and Mayur Palankar.
Comments