Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains скачать в хорошем качестве
Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains в качестве 4k
У нас вы можете посмотреть бесплатно Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
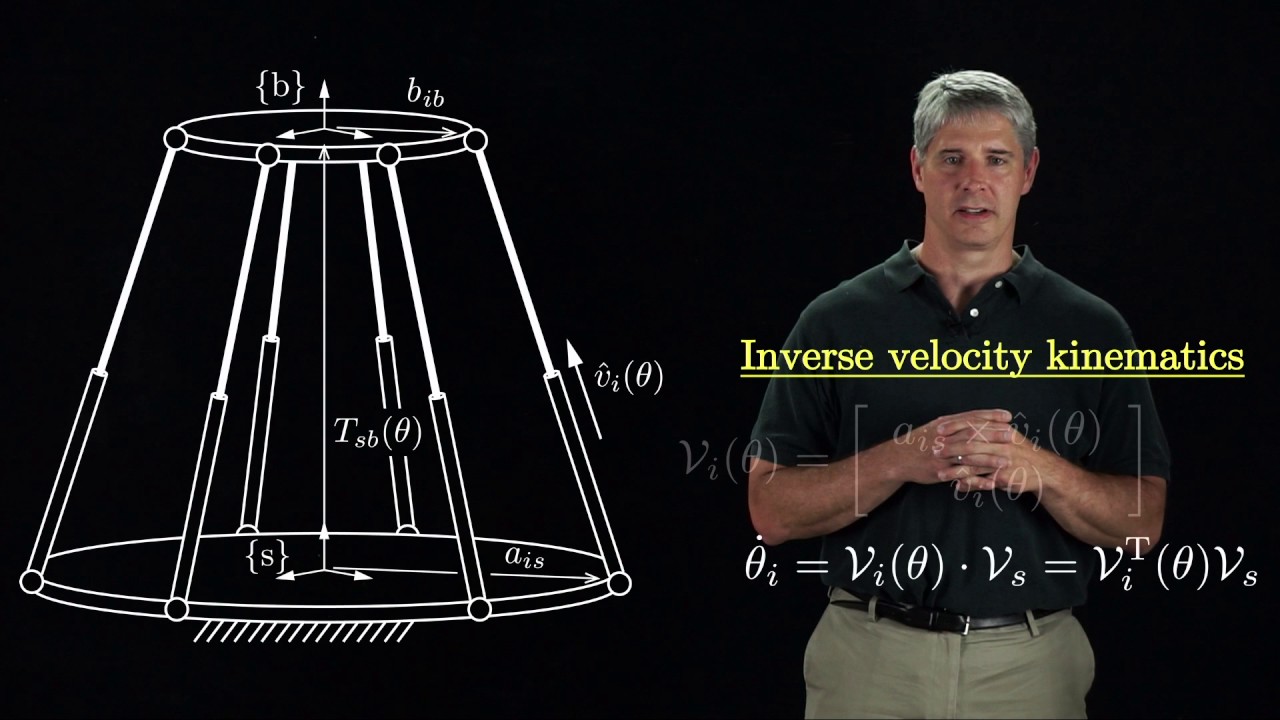
Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
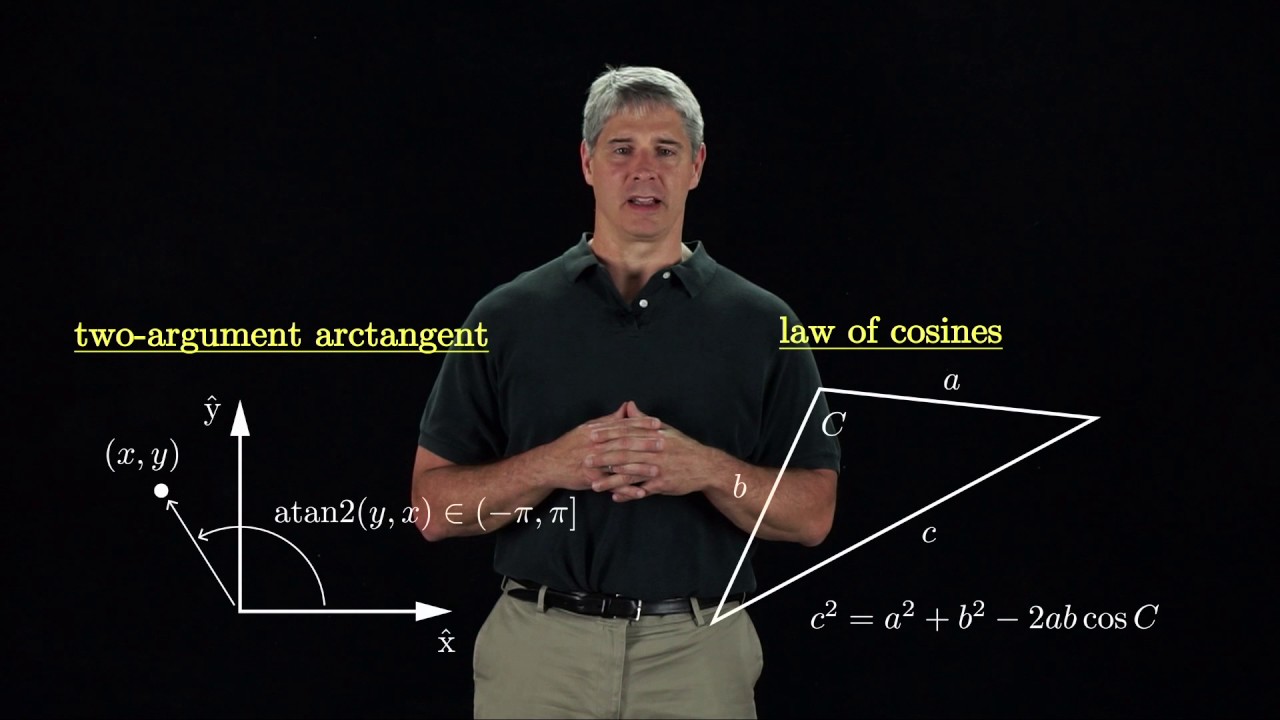
This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, Cambridge University Press 2017. See http://modernrobotics.org for information on the book, free software, and other materials. This video introduces the inverse kinematics problem--finding a set of joint positions that yield a desired end-effector configuration--as well as two ways of solving the problem: analytically and by an iterative numerical method. This video is a brief summary of material from the book, and it is not meant to stand alone. For more details, such as an explanation of the notation, please consult the book and the other videos. Playlist for Chapter 6: • Modern Robotics, Chapter 6: Inverse Kinem... Playlist for all book videos: • Modern Robotics, All Videos YouTube channel with all playlists: / kevinl2145 Wiki for the book, including software and other supplements: http://modernrobotics.org Modern Robotics is now a series of online courses on Coursera! https://www.coursera.org/specializati...
Comments