Kinetic Mesh in Underground Operations and Remote Applications скачать в хорошем качестве
Kinetic Mesh in Underground Operations and Remote Applications
2 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Kinetic Mesh in Underground Operations and Remote Applications в качестве 4k
У нас вы можете посмотреть бесплатно Kinetic Mesh in Underground Operations and Remote Applications или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Kinetic Mesh in Underground Operations and Remote Applications в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Kinetic Mesh in Underground Operations and Remote Applications
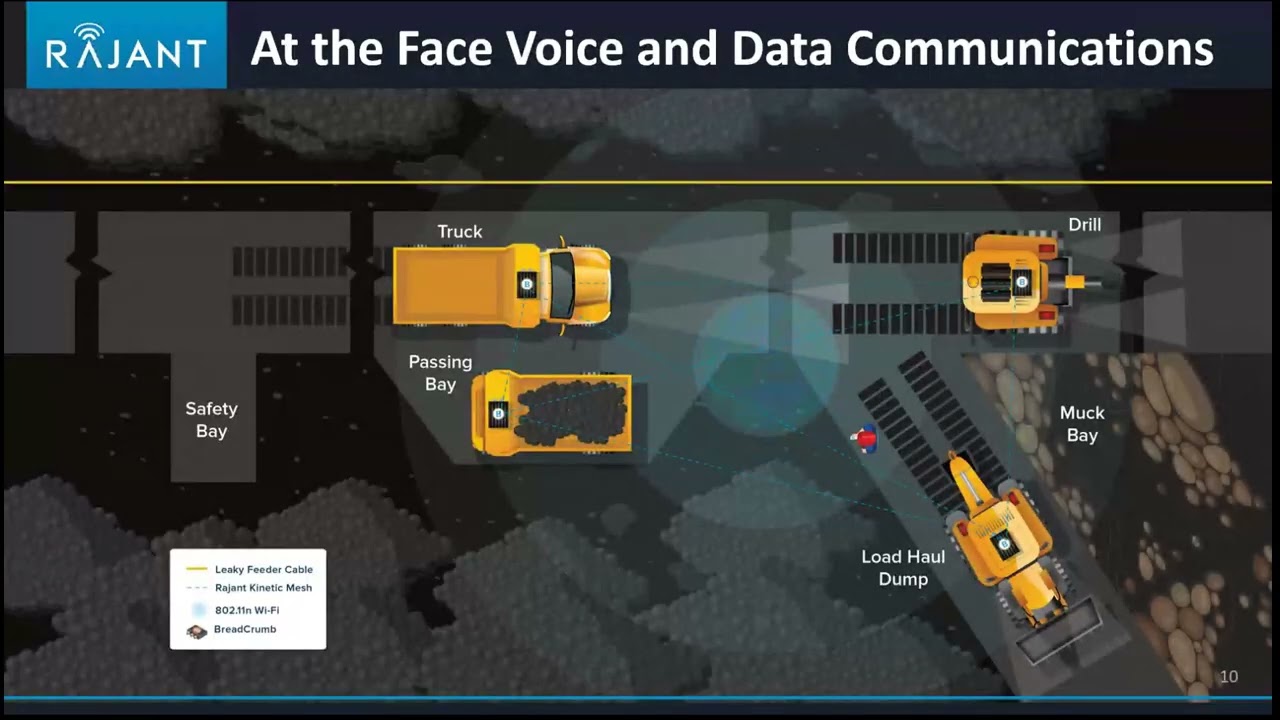
In this expert-led mining technology webinar moderated by John Williams of Global Mining Review, panelists Dr. Joe Cronin (Australian Droid + Robot) and Darrell Gillis and Mike Foletti from Rajant explore the critical role of wireless mesh networking in advancing underground mining operations. The discussion covers how combining mobile and fixed node locations enables autonomous operations and remote equipment control, as well as the systems and applications supported by resilient mesh connectivity—including voice communications, personnel and asset tracking, environmental monitoring, and control and production systems. The panel also examines real-world examples of underground mesh deployments, detailing network architecture and performance across shafts, declines, and active operational zones. Additional case studies highlight how mesh-enabled robotics and devices are used for remote inspection, mapping, videography, and surveying in hazardous underground environments. This session is ideal for mining professionals seeking to improve safety, efficiency, and digital transformation within underground operations.
Comments















![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)



