AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment скачать в хорошем качестве
AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment
7 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment в качестве 4k
У нас вы можете посмотреть бесплатно AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
AI MANIPULATOR #2: Sim2Real with OMY: From IsaacSim Training to Real-World Deployment
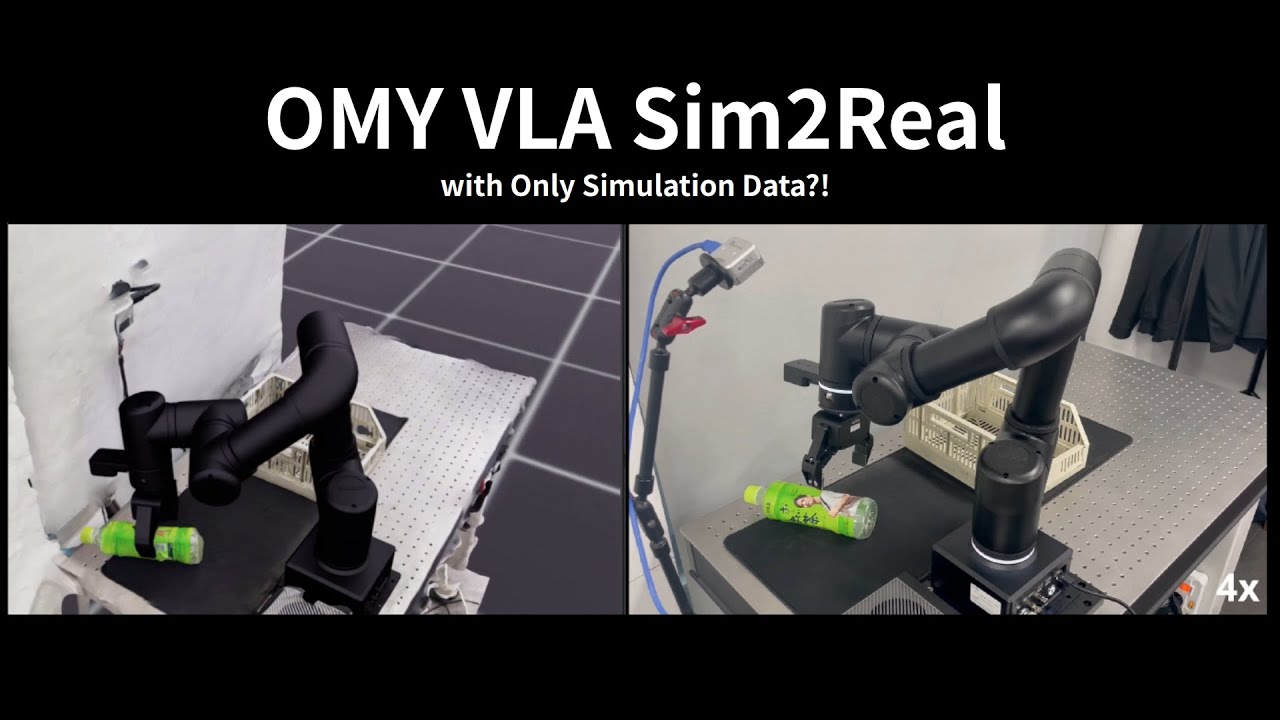
👋 Hello everyone! In today's video, we're excited to share a complete Sim2Real pipeline using the OMY robot — from reinforcement learning in simulation to real-world deployment. 👉 Introducing OMY OMY is a compact 6-DoF manipulator with a gripper, tailored for Physical AI and robotics learning. It supports both simulation and real-world operation, and its modular structure makes it ideal for research in imitation learning, reinforcement learning, and sim2real transfer. 🛠️ Simulation-to-Reality Workflow We begin in Isaac Sim, where the OMY robot is trained via reinforcement learning to perform a Reach task. After verifying the policy in Isaac Sim, we move on to Gazebo for Sim2Sim validation. The trained policy is then deployed on a Dynamixel-based dummy robot, where parameter tuning is conducted. Finally, the policy is transferred to the real OMY robot, completing the Sim2Real process. 🙏 Thank you so much for watching! If you have any questions or ideas, feel free to leave a comment. Your support helps us build better tools for the future of robotics and AI research. 📒 Manual https://ai.robotis.com/omy/introducti... 📥 GitHub Repository https://github.com/ROBOTIS-GIT/open_m... https://github.com/ROBOTIS-GIT/roboti... 💬 ROBOTIS FORUM https://forum.robotis.com/ #robotis #ros #omy #open_manipulator #robotics #physicalai #ai #Robot #Tech #opensource #deeplearning #Sim2Real #IsaacSim #GazeboSim #ReinforcementLearning #RobotDeployment
Comments
-
 7 месяцев назад
7 месяцев назад
-
 12 дней назад
12 дней назад
-
 8 дней назад
8 дней назад
-
 1 год назад
1 год назад
-
 2 года назад
2 года назад
-
 3 месяца назад
3 месяца назад
-
 7 месяцев назад
7 месяцев назад
-
 7 месяцев назад
7 месяцев назад
-
 4 года назад
4 года назад
-
 3 года назад
3 года назад
-
 8 месяцев назад
8 месяцев назад
-
 1 год назад
1 год назад
-
 2 недели назад
2 недели назад
-
 4 месяца назад
4 месяца назад
-
 Трансляция закончилась 7 месяцев назад
Трансляция закончилась 7 месяцев назад
-
 6 лет назад
6 лет назад
-
 7 месяцев назад
7 месяцев назад
-
 6 месяцев назад
6 месяцев назад
-
 3 года назад
3 года назад
-
 9 дней назад
9 дней назад