ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation скачать в хорошем качестве
ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation в качестве 4k
У нас вы можете посмотреть бесплатно ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
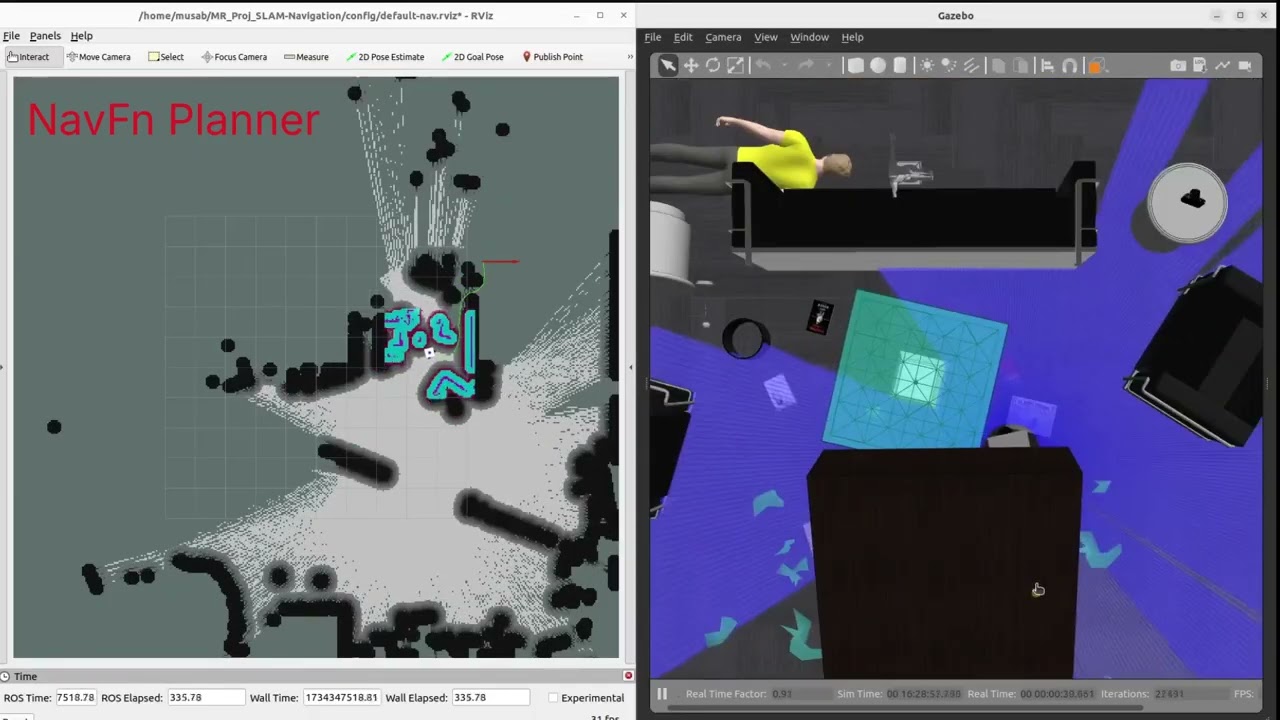
ROS2 PCL Point Cloud Voxel Filter and Planner Segmentation
Voxel grid filtering in PCL is a technique that downsamples a point cloud by dividing it into 3D voxels and retaining one point per voxel. It is commonly used for reducing computational complexity and smoothing noisy point clouds. 📝 Online School : https://www.robotisim.com/ 🎥 Youtube Playlist : • Плейлист 👨💻 Github Repository Link : https://github.com/noshluk2/ros2_lear... 🤓 Lets join on Discord : / discord 🖐My Social Profiles : Linkedin: / muhammad-luqman-9b227a11b Twitter: / noshluk2 Facebook Group : / roboticswithluqman #ros2 #robotics #gazebo #autonomousrobot #SLAM #pcl #pointcloud
Comments