Introducing Exwayz SLAM GNSS fusion скачать в хорошем качестве
Introducing Exwayz SLAM GNSS fusion
4 дня назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Introducing Exwayz SLAM GNSS fusion в качестве 4k
У нас вы можете посмотреть бесплатно Introducing Exwayz SLAM GNSS fusion или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Introducing Exwayz SLAM GNSS fusion в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Introducing Exwayz SLAM GNSS fusion
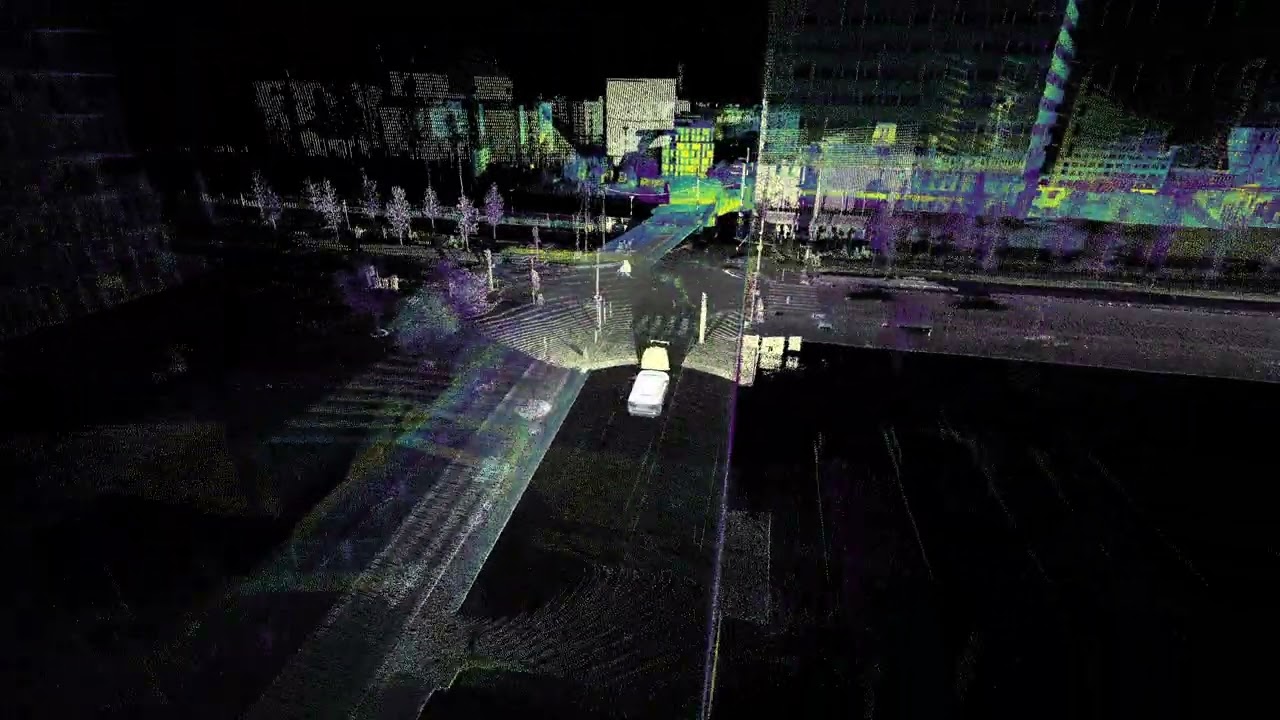
🛰️🧭 Map-Less Localization with Real-Time SLAM + GNSS Fusion We’re thrilled to share a brand-new feature in the Exwayz navigation package: real-time fusion of LiDAR SLAM and GNSS, now with map-less localization as a core capability ✨ In this video: Left: Live point cloud generated by our SLAM-GNSS fusion engine, reconstructed entirely on the fly as the system navigates a dense urban environment where GNSS often struggles. Right: Two trajectories in real time — GNSS with RTK correction vs. our fused SLAM output. Even with RTK, GNSS can be unreliable in real-world conditions 🌃. High-rise buildings, narrow streets, reflective façades, and covered staircases cause multipath, signal occlusion, jumps, drift, and occasional incorrect fixes. The raw GNSS trajectory clearly reflects these degradations. In contrast, the fused SLAM output remains smooth, continuous, and consistent 🚀. When GNSS quality drops, our algorithm relies on geometric constraints from the environment, and when GNSS recovers, it re-anchors the trajectory globally. Map-less localization means the system doesn’t need a pre-built map. It builds an understanding of its surroundings in real time while intelligently integrating absolute positioning when reliable 🧠. The result: globally referenced positioning with local geometric consistency, robust across open skies, urban canyons, and partially covered areas. And the best part? This demo runs smoothly in real-time on an NVIDIA Jetson Orin Nano 😎. We’re proud of this milestone. Delivering smooth, reliable, real-time localization in complex environments — even with hand-held motions — is a major step forward for mobile mapping, robotics, and autonomous systems operating outside controlled test scenarios. 💬 If you’re working on SLAM, GNSS, or advanced sensor fusion, we’d love to hear from you! #SLAM #GNSS #RTK #LiDAR #Robotics #SensorFusion #Mapping #AutonomousSystems #Localization #Mapless
Comments





![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)