Je commence à utiliser ROS - Let's build DROID #7 скачать в хорошем качестве
Je commence à utiliser ROS - Let's build DROID #7
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Je commence à utiliser ROS - Let's build DROID #7 в качестве 4k
У нас вы можете посмотреть бесплатно Je commence à utiliser ROS - Let's build DROID #7 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Je commence à utiliser ROS - Let's build DROID #7 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Je commence à utiliser ROS - Let's build DROID #7
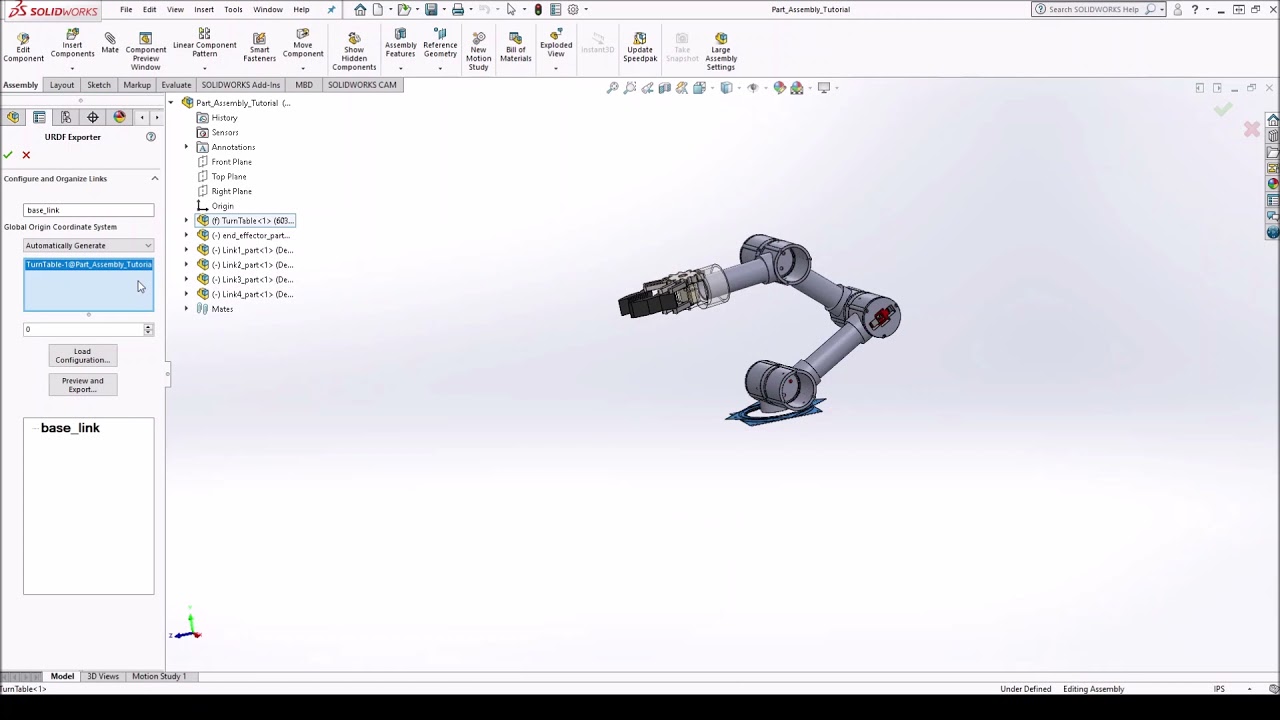
Cette fois un épisode un peu dense, je commence à utiliser ROS et je vous explique tout! Accrochez vous il y a plein de choses à voir. Il y a tellement de choses à dire sur ROS et je ne connais pas encore super bien, donc j'essaye de vous expliquer ce que je sais. Je vous montre comment j'ai configuré mon projet pour pouvoir lancer gazebo et ROS en même temps et les faire discuter entre eux. J'ai décidé d'utiliser ROS2 foxy et gazebo 11. Ça me permet d'utiliser des plugins et des noeuds fournis par ros directement pour poser les bases de mon architecture logicielle, et de pouvoir utiliser des outils tels que rviz. Maintenant que je vous ai expliqué ROS, vous pouvez trouver le code de mon projet sur gitlab: https://gitlab.com/lokiledev/droid Un mini tuto pour installer ros2 sur ubuntu 20.04: https://gitlab.com/-/snippets/2010059 A propos de ROS https://index.ros.org/doc/ros2/Releas... https://index.ros.org/doc/ros2/Instal... Les outils et stacks mentionnés dans la vidéo http://wiki.ros.org/rviz http://wiki.ros.org/rqt http://wiki.ros.org/navigation https://moveit.ros.org/ http://wiki.ros.org/ros_control https://github.com/chvmp/champ Qu'avez vous pensé de l'épisode? Est que c'est trop d'informations d'un coup? J'aurai du le découper? Est ce que vous préférez avoir juste des updates sur l'avancement du projet ou des explications comme ça détaillées ? #robot
Comments